Università degli Studi di Pisa
Facoltà di Ingegneria
Corso di Laurea in Ingegneria Elettronica
Tesi di Laurea
Confronto tra due protocolli per reti Wireless:
IEEE 802.11 e Bluetooth
Relatori:
Prof. R. Saletti
Prof. P. Terreni
Ing. F. Potortì
Ing. N. Celandroni
Candidato:
Maurizio Tallarico
Anno Accademico 2001/2002
Contents
1 Premessa
2 Introduzione
I Panoramica sui protocolli per Wireless LAN
3 Bluetooth
3.1 Il protocollo Bluetooth
3.2 Il livello Radio
3.2.1 La modulazione GFSK
3.2.2 Classi di potenza
3.2.3 Caratteristiche del ricevitore
3.3 Il livello Baseband
3.3.1 Indirizzamento dei dispositivi
3.3.2 Master, slave,piconet e scatternet
3.3.3 Temporizzazione e Clock
3.3.4 Tipi di Link: ACL e SCO
3.3.5 Struttura dei pacchetti Bluetooth
3.3.6 Prestazioni di un link Bluetooth a livello baseband
3.3.7 Supervisione del link
3.4 Il Link Controller
3.4.1 Stati del link controller
3.4.2 Sequenze di hopping
3.4.3 Schema generale per la generazione delle sequenze di hopping
3.4.4 Standby
3.4.5 Inquiry scan
3.4.6 Inquiry
3.4.7 Inquiry response
3.4.8 Page scan
3.4.9 Page
3.4.10 Slave response
3.4.11 Master response
3.4.12 Connection
3.4.13 Connection-Active mode
3.4.14 Connection-Hold mode
3.4.15 Connection-Sniff mode
3.4.16 Connection-Park mode
3.4.17 Struttura e gestione di una Scatternet
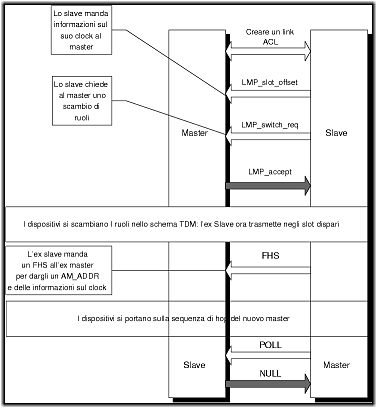
3.4.18 Scambio dei ruoli master-slave
3.5 Livelli superiori dello stack Bluetooth
3.5.1 Sicurezza
4 IEEE 802.11
4.1 Gli standard IEEE 802.11
4.2 La normativa italiana
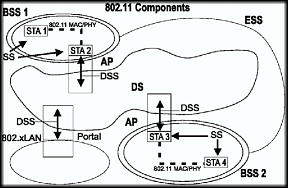
4.3 L'architettura di una WLAN IEEE 802.11
4.4 Servizi offerti dalle reti IEEE 802.11
4.5 Livello MAC del protocollo IEEE 802.11
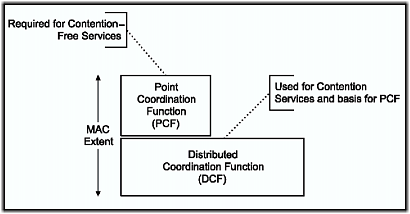
4.5.1 Architettura del MAC
4.5.2 Distributed Cooordination Function(DCF)
4.5.3 Point Coordination Function (PCF)
4.5.4 Sincronizzazione
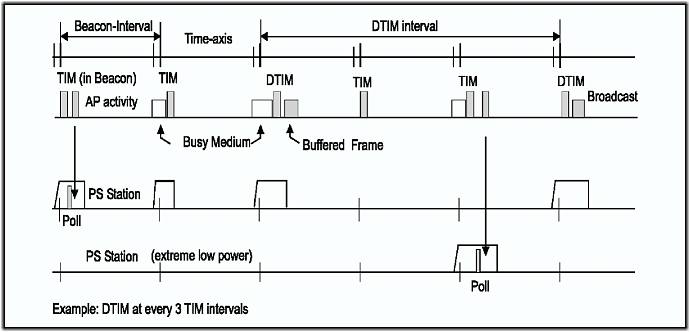
4.6 Power management e modalità Power Save
4.6.1 Power management in una WLAN con infrastruttura
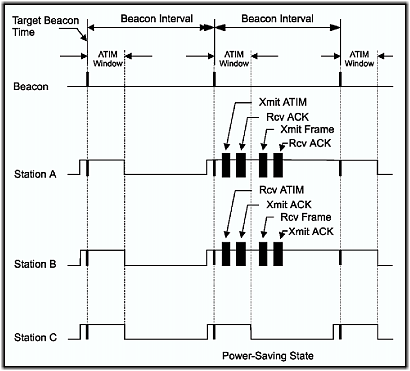
4.6.2 Power management in una WLAN ad hoc (IBSS)
4.7 Procedure di Scan e Join
4.7.1 Scan passivo
4.7.2 Scan Attivo
4.7.3 Roaming
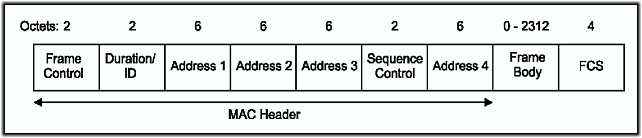
4.8 Formato dei pacchetti
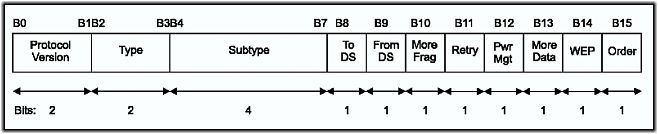
4.8.1 Formato generale dei frame
4.8.2 Descrizione dei campi
4.8.3 Descrizione di alcuni frame importanti
4.9 Livello fisico (PHY) del protocollo IEEE 802.11
4.9.1 IEEE 802.11 FHSS
4.9.2 IEEE 802.11 DSSS
4.9.3 IEEE 802.11 Hi-Rate DSSS
II Confronto tra i protocolli IEEE802.11 e Bluetooth
5 Confronto tra i protocolli a livello MAC
5.1 Creazione delle reti
5.1.1 Massima capacità
5.1.2 Velocità di creazione delle reti
5.1.3 Conclusioni
5.2 Topologie di rete
5.3 Comunicazione all'interno delle reti
5.3.1 Banda radio
5.3.2 Utilizzo della banda, tecniche di modulazione e trasmissione RF
5.3.3 Potenza di trasmissione
5.3.4 Pacchettizzazione e throughput
5.3.5 Conclusioni
5.4 QoS
6 Confronto costi e consumi
6.1 Intersil PRISM per IEEE 802.11b
6.1.1 Caratteristiche dell' hardware
6.1.2 Cosa offre lo standard IEEE 802.11 per la riduzione del consumo di potenza
6.1.3 Cosa offrono i chipset PRISM per la riduzione del consumo di potenza
6.1.4 Costi
6.2 CSR Bluecore per Bluetooth
6.2.1 Metodi standard Bluetooth per la gestione del consumo di potenza
6.2.2 Consumo di potenza
6.2.3 Costi
6.3 Confronto
7 Glossario
Scopo del presente lavoro di tesi è stato lo studio ed il confronto
tra alcuni standard di comunicazione wireless nell'ambito della realizzazione
di reti locali di computer (Wireless LAN). Il confronto è stato
effettuato a livello di protocollo e particolare attenzione è stata
rivolta al sottolivello MAC (Media Access Control).
Cosa sono le Wireless LAN
Le comunicazioni wireless, ed in particolare il
Wireless Networking,
rappresentano una tecnologia in rapida espansione che consente all'utente
un accesso a reti e servizi senza necessità di cablaggi. Possiamo
pensare, ad esempio,ad un utente provvisto di una serie di dispositivi,
generalmente indipendenti l'uno dall'altro, quali il telefono cellulare,
il computer portatile, il PDA
1e cosi via ed immaginare una situazione in cui questi dispositivi
possano interagire fra di loro, ad esempio per condividere documenti
presenti sul proprio computer portatile durante una riunione oppure
per ricevere la posta elettronica sul PDA invece che sul computer
fisso e tutto ciò senza necessità di alcun cablaggio. Possiamo pensare
ad operazioni più "quotidiane" come entrare in un
centro commerciale e veder comparire sul nostro PDA le ultime novità
e le offerte del giorno oppure scaricare sul computer portatile mappe
ed informazioni turistiche mentre si passa un casello autostradale
o si sosta in una stazione di servizio. Tutto questo oggi è già possibile
dal punto di vista tecnologico e le sperimentazioni sono già state
avviate con successo in molte parti del mondo, Italia compresa. Le
reti locali wireless sono senza dubbio uno dei possibili fulcri dell'attuale
e futura innovazione tecnologica.
Ovviamente l'approccio wireless nella realizzazione di reti di computer
presenta dei vantaggi ma anche degli svantaggi rispetto al classico
approccio cablato .Questi aspetti saranno illustrati nell'Introduzione
di questa tesi, insieme ad una panoramica sui vari "tipi"
di comunicazione wireless, distinti sia in relazione ai vari
campi
di applicazione che in relazione ai
vari mezzi trasmissivi
che si possono usare per eliminare la presenza dei cavi. In seguito,
nel Capitolo 2, vedremo una panoramica generale sugli standard wireless
attualmente disponibili per la realizzazione di
Wireless LAN,
mentre nel Capitolo 3 analizzeremo in dettaglio le caratteristiche
dei protocolli scelti come obiettivo della tesi, ovvero
Bluetooth
e
IEEE802.11.
Vantaggi e svantaggi dell'approccio Wireless
In via teorica, gli utenti di una rete locale wireless vogliono usufruire
degli stessi servizi e vorranno disporre delle stesse potenzialità
a cui una rete cablata li ha abituati. In pratica, l'equivalenza tra
i due approcci wireless e wired, è una sfida aperta. In particolare
l'approccio wireless, a fronte di innegabili vantaggi, è soggetto
ad alcuni limiti non presenti nell'approccio cablato. Osserviamo i
punti chiave del confronto tra i due approcci.
Mobilità
La libertà di movimento è uno dei vantaggi maggiori dei terminali
2 wireless nei confronti di quelli cablati, che sono statici quando
connessi alla rete locale. La mobilità impone peró la necessità
di considerare, a livello di sviluppo di sistemi, il problema dell'
"
handoff". In una wireless LAN ogni terminale
ha un'area di copertura chiamato "
cella",
sfruttando un paradigma delle reti di telefonia cellulare; in teoria,
le celle di una stessa rete si sovrappongono e quindi, per la maggior
parte del tempo, un terminale si trova all'interno della cella di
uno o più terminali. Se i terminali sono mobili, essi devono
poter passare da una cella ad un'altra in maniera "trasparente"
e senza perdere la connessione alla rete. Questo processo di passaggio
è detto appunto handoff. Grazie alla mobilità dei terminali
è più facile la gestione della loro posizione ovvero è
agevolata la scalabilità delle reti. Di solito in fase di progetto
di nuovi edifici , si potrebbe considerare la possibilità di cablare
gli ambienti dedicati alla presenza di nodi di una rete locale (uffici,
centri di calcolo e cosi via). È ovvio che tutto diventa più
difficile per edifici già esistenti e per cui non è stata prevista
la suddetta possibilità. Quest'ultima situazione è invece facilmente
gestibile con le reti locali wireless. È notevolmente più semplice
inoltre l'installazione di una rete locale laddove limiti ambientali
e strutturali impedirebbero l'installazione e la gestione di una rete
locale cablata standard (ad esempio strutture culturali quali musei
ed edifici storici da salvaguardare).
Allocazione delle frequenze
Tutti gli utenti di una stessa rete locale wireless devono operare
su una banda di frequenza comune, a prescindere dal mezzo trasmissivo
scelto. Le bande di frequenza dedicate a particolari applicazioni
devono ,di solito, essere approvate e necessitano di una licenza.
Inoltre questa regolamentazione può variare da paese a paese. Questo
problema è stato risolto dagli odierni standard per wireless
LAN, i quali usano delle particolari bande di frequenza accessibili
nella maggior parte dei paesi senza bisogno di alcuna licenza. La
tabella
2.1 riassume le bande di frequenza che non hanno
bisogno di licenza
3 :
| Banda | Mezzo Trasmissivo | Limiti | Normativa |
| ISM | Onde Radio in Spread Spectrum | 2.400 - 2.4835 GHz | FCC CFR47 Part 15 in USA e Canada, E.T.S. 300-328 in
Europa, Giappone ed altri paesi aderenti. |
| U-NII | Onde Radio | 5.725 - 5.850 GHz | FCC CFR47 Part 15 in USA e Canada, E.T.S. 300-328 in
Europa, Giappone ed altri paesi aderenti. |
| N/A | Infrarosso | Spettro visibile, circa 850nm | Tutto lo spettro e' liberamente utilizzabile in tutti
i paesi. |
Table 2.1: Bande tipicamente utilizzate per applicazioni WLAN
Interferenza e Affidabilità
L'interferenza nelle comunicazioni wireless può essere causata dalle
cosiddette collisioni, ovvero trasmissioni simultanee da parte di
due o più terminali wireless nella stessa banda di frequenza. In realtà
il problema dell'interferenza e' più ampio e coinvolge anche dispositivi
di uso comune che non hanno nulla a che vedere con le wireless LAN
ma che possono causare non pochi problemi al funzionamento di queste
ultime (ad esempio, un comune forno a microonde che opera nella banda
2.4-2.5 GHz). L'affidabilità del canale di comunicazione è misurata
in BER (Bit Error Rate). Questo valore indica il numero di
bit che hanno presentato un errore relativamente al numero totale
di bit ricevuti per una trasmissione. Di solito viene espresso con
una potenza negativa del dieci e dà un'indicazione di quante
volte un pacchetto (o un'altra unità informativa) dev'essere
ritrasmessa a causa di un errore.
Riservatezza dei dati
In una rete cablata il mezzo di trasmissione può essere reso sicuro
fisicamente e l'accesso alla rete può essere controllato
facilmente. In una wireless LAN, invece il mezzo trasmissivo è aperto
a tutti i terminali wireless che si trovano nel raggio d'azione di
un trasmettitore ed è perciò più difficile gestire la sicurezza sia
delle trasmissioni che dell'accesso alle varie reti. La riservatezza
dei dati e la protezione degli accessi sono di solito realizzati tramite
crittografia a vari livelli. Alcune conseguenze dell'adozione di un
certo grado di sicurezza indurranno probabilmente una certa riduzione
delle prestazioni insieme ad un aumento dei costi dei dispositivi.
Consumo di potenza
I dispositivi
di una rete cablata standard di solito sono alimentati dalla tensione
di rete. I dispositivi wireless invece, dovendo essere portatili nonché
mobili, sono di solito alimentati a batteria. Essi devono perciò essere
progettati con la massima attenzione per quanto riguarda l'efficienza
energetica.
Sicurezza degli utenti
Sono in corso da diverso tempo molteplici studi sui problemi che le
emissioni RF ( Radio Frequenza ) potrebbero causare
alla salute dell'utente. Le reti devono perciò essere progettate per
minimizzare la potenza trasmessa dai dispositivi di rete. Per quel
che riguarda i dispositivi wireless che utilizzano la tecnologia IR
(Infra Red) i trasmettitori ottici devono essere progettati,
ed in seguito installati, in modo da evitare danni alla vista.
Throughput
Dal punto di
vista del
throughput4 le wireless LAN, a causa di limiti sia fisici che di banda disponibile,
partono svantaggiate rispetto alle reti cablate ma, nel corso degli
anni le tecnologie che consentono la realizzazioni di wireless LAN
sono migliorate, fino a poter disporre oggi di terminali wireless
che possono comunicare ad una velocità di circa 54 Mbit/s.
Strutture tipiche e tecnologie per Wireless LAN
Le Wireless LAN forniscono tutte le funzionalità
delle LAN cablate ma senza richiedere alcun cablaggio fisico. Possiamo
distinguere sostanzialmente due tipi di configurazione per le WLAN
5 ovvero :
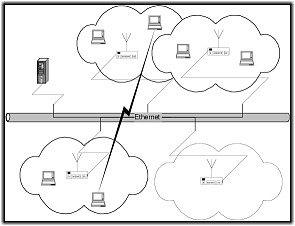
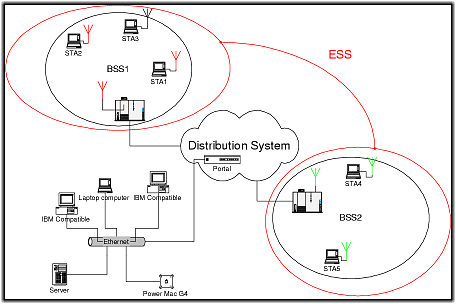
Figure 2.2: WLAN con Infrastruttura
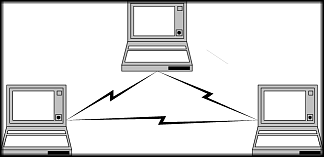
La topologia "
Ad Hoc" consiste nell'associazione
spontanea di un gruppo di terminali con lo scopo di realizzare delle
comunicazioni senza il sostegno di un'infrastruttura di rete ovvero
di un coordinamento da parte di un particolare terminale. La comunicazione
avviene quindi direttamente tra i terminali e l'area di copertura
è limitata dal range dei singoli terminali. Questa struttura
non prevede la connessione con una rete cablata ed è quindi costituita
soltanto da terminali di tipo wireless.
La topologia "
Infrastructured", al contrario,
viene realizzata per fornire agli utenti dei servizi particolari (ad
esempio la connessione con una rete LAN cablata preesistente o con
reti WAN
6 come
Internet), oppure per aumentare l'area di copertura della
rete WLAN. La comunicazione tra i terminali viene coordinata da un
terminale particolare
7 che gestisce anche i suddetti servizi aggiuntivi.
Dal punto di vista tecnologico, rispetto al mezzo trasmissivo utilizzato
i dispositivi si dividono in 3 categorie principali :
- IR WLAN : Le comunicazioni wireless che utilizzano la porzione
dello spettro denominata "infrarosso8", sono comunemente utilizzate per una vasta gamma di dispositivi
di controllo remoto. Di recente, le suddette comunicazioni ottiche
sono state oggetto di studio anche per quel che riguarda le applicazioni
nel campo delle reti di computer. Come per qualsiasi soluzione tecnica,
anche questa presenta vantaggi e svantaggi. Innanzitutto, come visto
anche in tabella 2.1, lo spettro infrarosso è virtualmente
illimitato e questo può permettere il raggiungimento di un'elevata
capacità trasmissiva. Inoltre lo spettro infrarosso è immune
da problemi di licenze. La radiazione infrarossa ha delle particolari
caratteristiche che la rendono interessante per alcuni tipi di configurazione
WLAN. Ovviamente tale radiazione non può oltrepassare muri o
altre superfici opache, ma, grazie alle sue proprietà di riflessione,
può essere riflessa diffusamente da oggetti colorati.
Perciò si può realizzare una WLAN che copra un'intera stanza
usando la riflessione del soffitto o delle pareti. Operando in questo
modo, ad esempio, sono nulle le interferenze tra due WLAN operanti
in ambienti adiacenti. Infine, il costo delle apparecchiature IR è
relativamente basso cosi come la loro complessità.
Questo mezzo trasmissivo presenta anche degli svantaggi : essendo
una radiazione luminosa, è soggetta ad interferenza da parte
di tutte le altre sorgenti luminose quali luce solare o luce artificiale.
Per acquisire maggiore robustezza nei confronti di queste interferenze
si potrebbe pensare di aumentare la potenza dei trasmettitori ma quest'ultima
è comunque limitata da problemi di consumo di potenza e dai pericoli
derivanti dall'uso dei raggi infrarossi.
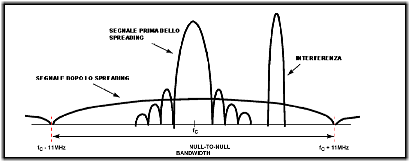
- Spread Spectrum WLAN : Il mezzo trasmissivo utilizzato è
la Radio Frequenza. Attualmente la tecnica dello spread spectrum9 è quella più usata per la realizzazione di WLAN. Questa
tecnica è stata inizialmente sviluppata per usi militari, proprio
perchè l'idea che sta alla base dello spread spectrum è
quella di "espandere" il contenuto informativo di
un segnale su una banda maggiore di quella richiesta per rendere l'intercettazione
più difficile. Questa non è l'unica ragione del successo
della tecnica dello spread spectrum: i trasmettitori spread spectrum
utilizzano gli stessi livelli di potenza dei trasmettitori narrowband10 ma , poichè lo spettro dei segnali è molto più ampio,
la loro densità spettrale di potenza è notevolmente più
bassa di quella dei trasmettitori narrowband. Dunque, i segnali spread
spectrum e quelli narrowband possono occupare la stessa banda con
bassissima interferenza.
Come tutti i dispositivi che utililizzano un mezzo trasmissivo RF,
anche i dispositivi spread spectrum WLAN sono soggetti al problema
cosiddetto "multi-path fading". Questo termine
indica la situazione nella quale un segnale RF arriva ad un ricevitore
da una serie di singoli percorsi di propagazione a causa delle riflessioni
del segnale trasmesso su oggetti stazionari o in movimento. La lunghezza
dei suddetti percorsi di propagazione è generalmente diversa
e perciò i vari segnali arrivano al ricevitore con diversi ritardi.
Questi ritardi si traducono in differenze di fase sui segnali. Il
segnale risultante al ricevitore è la somma vettoriale dei segnali
componenti e quindi tipicamente si hanno delle variazioni di ampiezza
che hanno dato origine al termine "fading"
poichè è molto probabile che l'ampiezza del segnale risultante
sia più bassa di quella del segnale trasmesso.
La tecnica di spread spectrum può essere implementata in vari modi.
Cronologicamente la prima implementazione è stata il cosiddetto
frequency hopping spread spectrum mentre attualmente si preferisce
usare la tecnica
direct sequence spread spectrum. In generale
si usa il modello mostrato in figura
2.3:
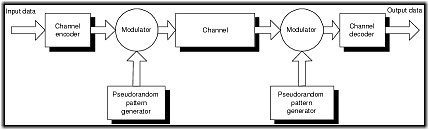
Figure 2.3: Modello generico di un sistema di comunicazioni Spread Spectrum
I dati vengono inviati ad un channel encoder che produce un
segnale analogico con una banda relativamente stretta attorno ad una
frequenza centrale. Questo segnale viene poi modulato usando una sequenza
casuale di cifre detta pseudorandom sequence ed è proprio
questa modulazione che incrementa significativamente la banda del
segnale che dev'essere trasmesso. Dal lato del ricevitore, si usa
la stessa pseudorandom sequence per demodulare il segnale spread
spectrum. Infine il segnale viene inviato al channel decoder
per recuperare il contenuto informativo. Osserviamo ora più in
dettaglio le tecniche che implementano lo spread spectrum.
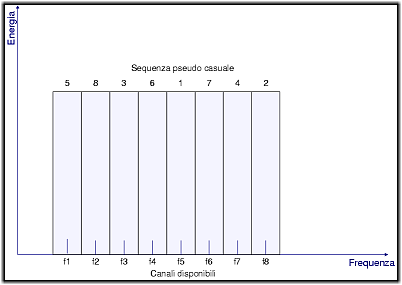
- Frequency Hopping Spread Spectrum
-
Questa implementazione
consiste nel trasmettere il segnale usando una sequenza pseudo casuale
di frequenze radio11, "saltando" di frequenza in frequenza ad intervalli
di tempo fissati (ovvero con uno specifico "hop rate").
Dall'altro lato del canale, solo i ricevitori che conoscono la particolare
sequenza di hopping del trasmettitore possono ricevere correttamente
l'informazione.
Figure 2.4: Allocazione dei canali e sequenza pseudocasuale
La figura
2.4 mostra come vengano allocati un certo numero
di "canali" per il segnale FH
12.
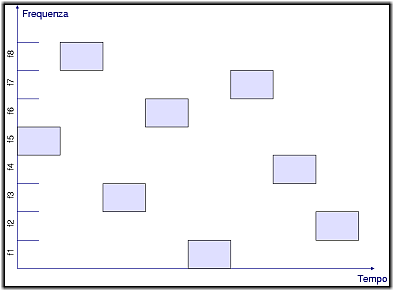
Figure 2.5: FHSS: uso del canale nel dominio del tempo
Come si vede dalla figura
2.5, il trasmettitore opera su
una frequenza alla volta per un periodo di tempo prefissato
13, durante il quale uno o più bit vengono trasmessi; dopodiché
esso continua a trasmettere ma "saltando" alla frequenza
che viene immediatamente dopo nella sequenza di hopping prestabilita
in maniera "pseudo casuale".
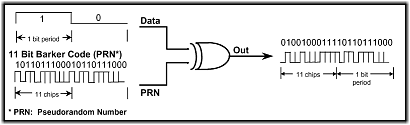
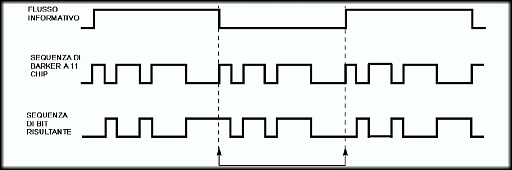
- Direct Sequence Spread Spectrum
- Ogni singolo bit d'informazione del segnale
originale viene codificato con un codice rappresentato da una sequenza
di bit detta "chipping code". Questo processo
detto "spreading" espande il segnale su una
banda più ampia di quella richiesta per la trasmissione e tale
espansione è direttamente proporzionale al numero di bit che
compongono il chipping code. La sequenza di spreading è generata
ad una velocità più alta rispetto al data rate del segnale
informativo originale. Nel trasmettitore, il segnale informativo viene
combinato in qualche modo con il chipping code (di solito si compie
una operazione di OR Esclusivo (XOR) tra i due segnali). In
seguito questa combinazione viene convertita in un simbolo
che viene modulato e trasmesso. Dal lato del ricevitore si effettua
l'operazione inversa (detta "De-spreading")
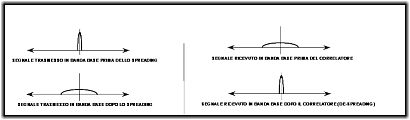
per ottenere il segnale originario. Osserviamo le seguenti figure
:
Figure 2.6: DSSS: spettro dei segnali trasmesso e ricevuto
Figure 2.7: DSSS: spreading dei dati
La figura
2.7 si riferisce in particolare
all'operazione di spreading mediante
sequenza di Barker, che
analizzeremo in dettaglio nel capitolo dedicato allo standard IEEE
802.11.
Volendo fare un confronto tra le due tecniche possiamo osservare che
:
- - I sistemi FH sono suscettibili al rumore durante un singolo "slot"
ma a lungo termine possono realizzare una comunicazione quasi senza
errori poichè la comunicazione si sposta lungo tutta la banda. I sistemi
FH sono più semplici di quelli DS nel senso che gli schemi di modulazione
utilizzati sono più semplici e quindi richiedono una minore complessità
dal lato del ricevitore. A fronte di questi aspetti positivi dei sistemi
FH, osserviamo che il loro data rate massimo è condizionato
dall'ampiezza dei canali e, sfruttando tutta la banda a loro disposizione,
tendono a causare maggiori interferenze su altri sistemi.
- - Il vantaggio principale dei sistemi DS è la possibilità di ottenere
data rate più alti rispetto ai sistemi DS usando schemi di
modulazione più complicati. Comunque, in generale, i metodi di modulazione
usati nei dispositivi DS complicano la circuiteria dal lato del ricevitore.
- - La situazione attuale del mercato WLAN basati su Spread Spectrum
vede una quasi completa predominanza dei sistemi DS sui sistemi FH.
Part 1
Panoramica sui protocolli per Wireless LAN
Bluetooth
14[
4],[
5] è uno standard globale per comunicazioni
wireless
basato su un sistema radio a basso costo e a corto raggio d'azione.
Questa tecnologia facilita il rimpiazzo dei cavi di collegamento tra
dispositivi, realizzando un collegamento radio universale. Stampanti,
computer portatili, computer fissi,
PDA,
fax, tastiere,
joystick,
mouse, tutti questi dispositivi possono far
parte di un sistema Bluetooth. Oltre a sostituire i cavi, Bluetooth
può anche agire da collegamento verso reti preesistenti (ovvero agire
da
bridge) oppure può essere visto come un sistema per realizzare
piccole reti ad hoc quando ci si trova lontano da altre infrastrutture
di rete. L'idea che portò alla tecnologia Bluetooth nacque nel 1994
quando la
Ericsson Mobile Communication avviò uno studio
di fattibilità di un sistema radio a basso consumo di potenza e a
corto raggio per eliminare i cavi di collegamento tra i propri telefoni
cellulari e i vari accessori (cuffie, PDA, schede per PC portatili
e computer fissi). Nel 1998, Ericsson, Nokia, IBM, Toshiba e Intel
formarono il Bluetooth SIG (
Special Interest Group). Nel 1999
furono rilasciate le prime specifiche del protocollo Bluetooth (Bluetooth
V1.0). L'anno seguente si unirono al Bluetooth SIG altre quattro compagnie:
3COM, Agere (Lucent Technologies), Microsoft, e Motorola, e venne
lanciato sul mercato il primo prodotto finale ovvero un
headset
(cuffia e microfono per telefono cellulare) della Ericsson. Attualmente,
le specifiche Bluetooth sono alla versione V1.1 e da marzo 2002 sono
disponibili anche le specifiche IEEE802.15.1, rilasciate dall'IEEE
(Institute for Electric and Electronic Engineering
http://www.ieee.org)
, perfettamente compatibili con le suddette specifiche Bluetooth v1.1.
Le previsioni di mercato vedono un volume di circa 50 milioni di
chip
Bluetooth venduti entro l'anno 2002 e, a medio termine, si prevede
un passaggio dai 10.4 milioni di chip venduti nel 2001, ai 690 milioni
nel 2006.
3.1 Il protocollo Bluetooth
Il protocollo Bluetooth contiene una serie di specifiche che definiscono
i vari livelli del protocollo stesso. Una caratteristica peculiare
delle specifiche Bluetooth consiste nel fatto che esso non definisce
solo un'interfaccia radio ma un intero
stack15 software che permette ai dispositivi di trovarsi a vicenda, scoprire
quali servizi essi offrano e quindi usare tali servizi. Il protocollo
Bluetooth è organizzato a livelli, anche se alcune funzioni che esso
offre sono distribuite su più di un livello.
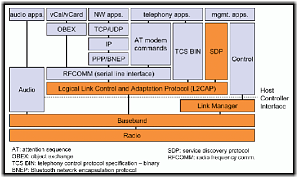
Figure 3.1: Il protocollo Bluetooth (blocchi color arancio)
Ciascun blocco di colore arancio nella figura
3.1 corrisponde
ad un capitolo della parte delle specifiche Bluetooth, denominata
Core. In più, nel core, troviamo altri tre capitoli:
- Modalità di Test dei dispositivi Bluetooth
- Richieste di compatibilità Bluetooth
- Interfaccia di controllo per la modalità Test
Oltre al core, Bluetooth fornisce anche i cosiddetti
Profiles,
che danno dei dettagli su come alcune particolari applicazioni dovrebbero
usare il protocollo Bluetooth.
La sezione
radio è una parte fondamentale di un dispositivo
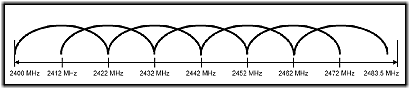
Bluetooth. I dispositivi Bluetooth operano nella banda ISM 2.4 GHz.
Questa banda non richiede la licenza delle frequenze utilizzate ma,
e, proprio per questo, i dispositivi Bluetooth devono essere molto
tolleranti rispetto alle interferenze presenti. In USA e nella maggior
parte dell'Europa sono disponibili 83.5 MHz; in questa banda vengono
allocati 79 canali RF spaziati di 1 MHz. In Giappone, Francia e Spagna
sono disponibili solo 23 canali RF sempre spaziati di 1 MHz.
| Localizzazione | Limiti di banda | Canali RF |
| USA e la maggior parte d'Europa | 2.4000 - 2.4835 GHz | f=2402+k MHz, k=0,...,78 |
| Francia | 2.4465 - 2.4835 GHz | f=2454+k MHz, k=0,...,22 |
| Spagna | 2.4450 - 2.4750 GHz | f=2449+k MHz, k=0,...,22 |
| Giappone | 2.4710 - 2.4970 GHz | f=2473+k MHz, k=0,...,22 |
Table 3.1: Bande di frequenza Bluetooth
Bluetooth adotta la tecnica frequency hopping spread spectrum, quindi
il canale fisico è rappresentato da una sequenza pseudo casuale
dei 79 (o 23) canali RF disponibili; ovviamente, i dispositivi progettati
per operare in paesi con un insieme ridotto di frequenze di hopping,
non possono funzionare nei paesi in cui sono disponibili tutti i canali
RF previsti per la banda ISM 2.4 GHz, né viceversa. La velocità di
segnalazione è di 1Msimbolo/s e questo si traduce in una velocità
di trasferimento teorica di 1 Mbit/s poiché è stato scelto come schema
di modulazione il GFSK (
Gaussian shaped Frequency Shift Keying).
Il canale fisico è diviso in slot da 625μ
s, ed i dispositivi
cambiano frequenza una volta ogni pacchetto
16, tenendo presente che un pacchetto può durare uno, tre oppure cinque
slot.
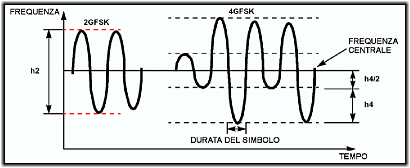
3.2.1 La modulazione GFSK
La modulazione GFSK è una variante della modulazione FSK (
Frequency
Shift Keying, che, per un bit d'informazione di valore 1 origina
uno scostamento di frequenza positivo rispetto alla portante nominale
del canale in cui il sistema FH sta operando ad un dato istante. Al
contrario, un bit di valore 0 dà origine ad uno scostamento negativo
della suddetta portante. La modulazione GFSK adottata da Bluetooth
prevede un
prodotto BT17 pari a 0.5 e un
indice di modulazione compreso tra 0.28 e
0.35. Il prodotto BT è il prodotto della distanza frequenziale tra
segnali adiacenti(0.5 MHz) (bandwidth) e la durata temporale del simbolo(1
μ
s) (time). Un valore per BT di 0.5 corrisponde alla minima
distanza di separazione tra le portanti che garantisce l'ortogonalità
18 tra segnali in canali adiacenti. L'indice di modulazione rappresenta
l'ampiezza del già citato scostamento di frequenza (o deviazione di
frequenza) (f
d), e può essere espresso come 2×
fd×
T,
dove T è la durata del simbolo. Ciò si traduce in un intervallo di
variazione della frequenza da 140 KHz a 175 KHz. Le specifiche Bluetooth
danno un minimo di 115 KHz come variazione assoluta.
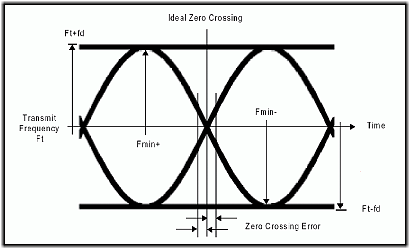
Figure 3.2: La modulazione GFSK
La G-FSK adotta un filtro Gaussiano per "addolcire"
le transizioni di frequenza, cosicché la frequenza portante cambia
seguendo un inviluppo di forma Gaussiana e vengono ridotte le dimensioni
spettrali dei lobi laterali, migliorando così l'efficienza spettrale
e riducendo l'interferenza intersimbolica. Il filtro Gaussiano agisce
sul flusso dei bit trasmessi e può essere implementato sia nella sezione
radio tramite un filtro analogico, sia nella sezione digitale del
livello baseband usando un filtro FIR implementato come un
linear feedback shift register(LFSR) o, infine, come una parte
di una lookup table.
I dispositivi Bluetooth vengono divisi in 3
classi di potenza,
a seconda della potenza massima d'uscita del trasmettitore.
| Classe di potenza | Potenza d'uscita massima | Potenza d'uscita nominale | Potenza d'uscita minima | Controllo della potenza
in uscita |
| 1 | 100 mW(20 dBm) | N/D | 1 mW(0 dBm) | obbligatorio da +4 dBm a 20 dBm |
| 2 | 2.5 mW(4 dBm) | 1 mW(0 dBm) | 0.25 mW(-6 dBm) | opzionale da -30 dBm a 4 dBm |
| 3 | 1 mW(0 dBm) | N/D | N/D | opzionale da -30 dBm a 4 dBm |
Table 3.2: Classi di potenza dei dispositivi Bluetooth
| Classe di Potenza | Range (scenario senza ostacoli) |
| 1 | 100 m |
| 2 | 10 m |
| 3 | 10 cm |
Table 3.3: Range teorico in base alla classe di potenza dei dispositivi Bluetooth
3.2.3 Caratteristiche del ricevitore
Definiamo
actual sensitivity level (effettivo livello di sensibilità)
di un ricevitore RF il livello del segnale d'ingresso per il quale
si ottiene un BER pari a 0.1%. Per un ricevitore Bluetooth, viene
richiesto un actual sensitivity level minimo di -70dBm. È interessante
notare come i dispositivi radio Bluetooth siano dotati di una funzionalità
loop back , utile per misurare la loro prestazione in termini
di BER
19.
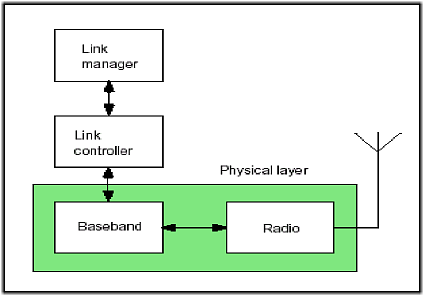
Cominciamo a descrivere questo livello
dello stack Bluetooth facendo una distinzione chiara tra i termini
link controller e
baseband, i quali sono a volte usati
ambiguamente nelle specifiche Bluetooth.
Figure 3.3: Bluetooth:baseband e link control
Il link controller (LC) si occupa di svolge operazioni relative alla
trasmissione di diversi pacchetti, in risposta ai comandi del link
manager (LM). Le entità LC ai due lati di una connessione gestiscono
il processo di creazione della connessione stessa richiesta dal LM,
e mantengono nel tempo la connessione, una volta stabilita. Il baseband
invece, è responsabile delle operazioni di codifica e decodifica,
di controllo della temporizzazione a basso livello e, in generale,
è responsabile della gestione della connessione ma nel dominio del
singolo pacchetto dati.
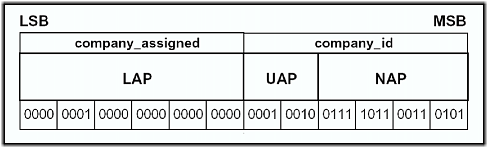
3.3.1 Indirizzamento dei dispositivi
Ogni dispositivo Bluetooth ha un indirizzo di 48 bit compatibile IEEE
MAC detto
Bluetooth device address (BD_ADDR). Questo indirizzo
è diviso in 3 parti:
- BD_ADDR[47:32] - NAP[15:0]
Usato per inizialiazzare il flusso che va al ``motore'' che realizza
la crittografia (LFSR).
- BD_ADDR[31:24] - UAP[7:0]
Usato per inizializzare i meccanismi HEC (header error correction)
e CRC (cyclic redundancy check) e per il FH.
- BD_ADDR[23:0] - LAP[23:0]
Usato per la generazione della sync word e per il FH.
Figure 3.4: Formato del BD_ADDR
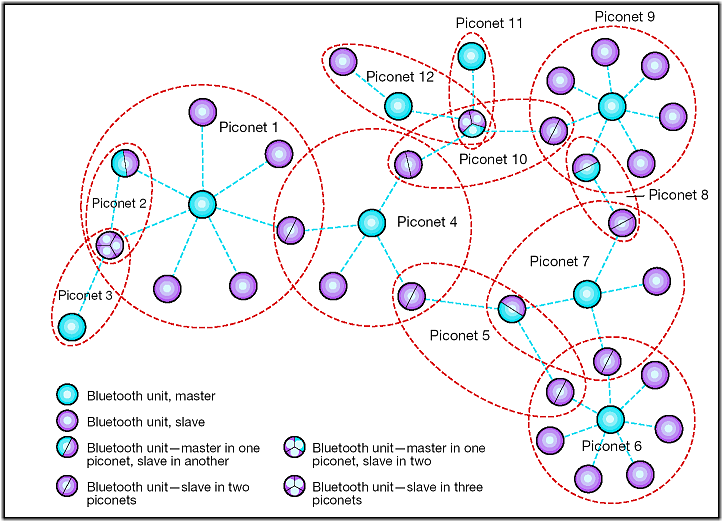
3.3.2 Master, slave,piconet e scatternet
Come abbiamo visto, Bluetooth adotta la tecnica FHSS, la banda operativa
è divisa in canali spaziati di 1 MHz e la velocità di modulazione
è di 1Msimbolo/s. Il canale fisico è diviso in slot da 625μ
s,
e i dispositivi cambiano frequenza una volta ogni pacchetto, tenendo
presente che un pacchetto può durare uno, tre oppure cinque slot.
L'hop rate
20 è fissato a 1600
hops/s.
La tecnica frequency hopping impone che i dispositivi Bluetooth che
vogliono comunicare, conoscano e seguano la stessa sequenza di hopping.
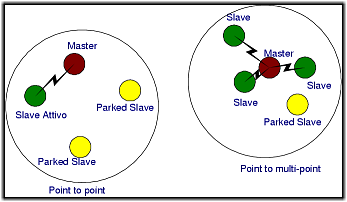
I dispositivi Bluetooth possono operare in due diverse modalità :
Questo non vuol dire che, a livello circuitale e costruttivo, vi siano
delle differenze tra un dispositivo che opera come master e uno che
opera come slave. E' il master che decide la sequenza di hopping,
gli slave che vogliono comunicare con un certo master devono sincronizzarsi
in frequenza e tempo con la sequenza di hopping del master. Una serie
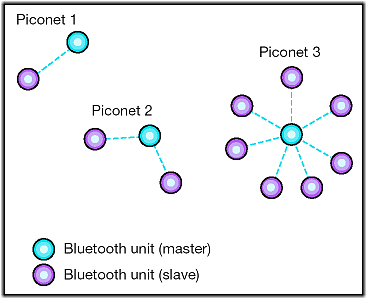
di slave che operano insieme e sono sincronizzati con uno stesso master
formano una cosiddetta
Piconet.
Una piconet può essere formata da un master ed un massimo di sette
slave "attivi", dove per slave attivo si intende
un'unità che rimane sincronizzata al master della piconet. Lo standard
Bluetooth prevede comunque, come vedremo in seguito, alcune modalità
di funzionamento per i dispositivi (modalità park ad esempio)
che permettono di ampliare "virtualmente" la
dimensione di una piconet, nel senso che alcuni dispositivi, essenzialmente
per limitare il consumo delle batterie, potranno dissociarsi temporanemente
dall'attività della piconet, ma rimanere informati periodicamente
dal master in modo da poter rientrare attivamente nella piconet in
qualsiasi momento, purché ovviamente ci sia posto.
E' il livello baseband che descrive ed applica l'algoritmo usato
dai dispositivi Bluetooth per derivare una sequenza di hopping dal
proprio BD_ADDR e dal proprio clock. In una singola piconet, la sequenza
di hopping è unica ed è derivata dal BD_ADDR e dal clock del master.
Quando uno slave si unisce alla piconet viene informato dal master
stesso sul proprio BD_ADDR e sul proprio clock cosicché lo slave
possa calcolare la sequenza di hopping da usare per le comunicazioni
nella piconet.
Oltre a controllare la sequenza di hopping, il master è il vero dominatore
del mezzo trasmissivo, nel senso che esso decide quando i dispositivi
che fanno parte della propria piconet possono trasmettere. Bluetooth
distingue a questo proposito due tipi di traffico:
Il master decide quando gli slave possono trasmettere allocando degli
slot per il traffico voice e degli slot per il traffico dati. Per
il traffico dati, uno slave può trasmettere solo in risposta ad una
trasmissione del master ad esso indirizzata, ovvero se il master durante
uno slot riservato al traffico data ha trasmesso un pacchetto indirizzato
verso uno specifico slave, il successivo slot è allocato automaticamente
per una eventuale trasmissione di dati da parte unicamente di quel
particolare slave, a prescindere se esso abbia o non abbia effettivamente
dati da trasmettere. Per il traffico voce invece, gli slave trasmettono
in slot riservati dal master, a prescindere se siano stati destinatari
di una precedente trasmissione oppure no. In ogni caso, la comunicazione
avviene sempre tra il master e uno slave, cosicché se uno slave dovesse
trasmettere un pacchetto ad un altro slave nella stessa piconet, tale
pacchetto dovrebbe comunque passare attraverso il master. Questo sistema
di divisione degli slot temporali fra 2 dispositivi si chiama
Time
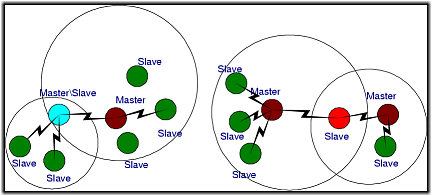
division duplex (TDD). Abbiamo visto come il numero degli slave attivi
che compongono una piconet sia limitato a sette. Si può comunque realizzare
un'area di copertura più ampia (realizzando così una rete più grande)
collegando insieme più piconet, a formare quella che Bluetooth definisce
Scatternet.
Quando un dispositivo è presente in più di una piconet, deve dividersi
e operare per un certo numero di slot in una piconet, usando la sequenza
di hopping di quella piconet, e poi, cambiando sequenza di hopping,
passare ad operare in un'altra piconet. Nella figura
3.6,
a sinistra osserviamo una scatternet in cui un dispositivo Bluetooth
si comporta da master per una piconet e da slave nell'altra piconet.
A destra osserviamo invece la situazione in cui un dispositivo si
comporta da slave in due piconet diverse. Non è possibile utilizzare
un dispositivo Bluetooth come master in due piconet diverse, poiché,
per definizione, tutti i dispositivi sincronizzati con uno stesso
master fanno parte della stessa piconet. Come abbiamo visto, una caratteristica
frequente dei terminali wireless è la mobilità; un terminale Bluetooth
mobile può quindi, muovendosi, perdere contatto con la propria piconet:
non c'è alcun problema poichè il suo collegamento alla piconet ha
un
supervision timeout che assicura la chiusura dei collegamenti
quando i dispositivi Bluetooth si allontanano dall'area di copertura
della piconet (vedi
3.3.7).
3.3.3 Temporizzazione e Clock
Illustreremo ora il concetto del
clock Bluetooth. Bluetooth
sincronizza la maggior parte delle operazioni con un clock in tempo
reale. Esso servirà, ad esempio, a sincronizzare gli scambi di dati
tra i dispositivi, distinguere tra pacchetti ritrasmessi o persi,
generare una sequenza pseudo casuale predicibile e riproducibile.
Il clock Bluetooth è realizzato con un contatore a 28 bit che viene
posto a 0 all'accensione del dispositivo e subito dopo continua senza
fermarsi mai, incrementandosi ogni 312.5μ
s(metà slot quindi).
Il ciclo del contatore copre approssimativamente la durata di un giorno:
312.5μs×228 ≅ 23.3 ore
Ogni dispositivo Bluetooth ha il suo native clock (CLKN) che
controlla la temporizzazione di quel dispositivo. Oltre a questo valore,
proprio di ogni dispositivo, Bluetooth definisce altri due clock
- CLK: questo è il clock della piconet, coincide con il CLKN dell'unità
master della piconet. Tutte le unità attive nella piconet devono sincronizzare
il proprio CLKN con il CLK. La sincronizzazione avviene aggiungendo
un offset al CLKN dello slave per farlo coincidere con il CLK della
piconet.
- CLKE: anche questo clock è derivato tramite un offset dal CLKN ed
è usato dal master nel caso specifico della creazione di una connessione
verso uno slave, e prima che tale slave si sia sincronizzato con il
master (ovvero quando si tratta di un nuovo slave).
I primi 2 bit del contatore vengono usati direttamente per delimitare
gli slot e i cosiddetti "mezzi slot", per la
trasmissione e ricezione dei pacchetti; essi servono anche a stabilire
nel tempo gli slot
Tx (trasmissione) o
Rx (ricezione)
a seconda se il dispositivo in questione stia funzionando da master
o da slave. Una trasmissione da parte del master comincerà sempre
quando
CLK[1:0]=00(slot di indice pari), mentre una trasmissione
da parte di uno slave comincerà sempre quando
CLK[1:0]=10 (slot
di indice dispari).
3.3.4 Tipi di Link: ACL e SCO
Un "link" è un collegamento che viene stabilito
tra un dispositivo master e un dispositivo slave. Una volta instaurato
tale collegamento, ci sono due tipi di "servizi"
che possono essere svolti sfruttando il collegamento:
- Servizi di tipo Asincrono : vengono riferiti da Bluetooth con il termine
ACL (Asynchronous Connection-Less)
- Servizi di tipo Sincrono : vengono riferiti da Bluetooth con il termine
SCO (Synchronous Connection-Oriented)
Tali servizi sono svolti tramite lo scambio di pacchetti. Vi sono
alcuni pacchetti dedicati esclusivamente ai servizi ACL, altri dedicati
esclusivamente ai servizi SCO ed infine dei pacchetti "misti".
ACL
Un link
21ACL esiste non appena viene creata una connessione tra un master e
uno slave. Un master può avere un qualsiasi numero di link ACL con
un certo numero di slave diversi, ma può esistere solo un link ACL
tra due dispositivi
22. Un link ACL realizza un collegamento a
commutazione di pacchetto
tra il master e lo slave: i pacchetti vengono scambiati sporadicamente
e cioè quando sono disponibili dei dati da inviare dai livelli superiori
dello stack Bluetooth. La scelta di quale slave deve ricevere o trasmettere
è fatta dal master slot per slot al passare del tempo, e così sono
possibili sia dei servizi asincroni che "isocroni"
23. Alcuni tipi di pacchetti ACL prevedono la possibilità di sfruttare
degli schemi di ritrasmissione e delle tecniche di controllo d'errore,
per aumentare la robustezza della trasmissione. Uno slave può rispondere
con un pacchetto ACL nel successivo slot "slave-master"
se e solo se è stato indirizzato direttamente nel precedente slot
"master-slave". Ovviamente, date le caratteristiche
del mezzo trasmissivo RF, tutti gli slave nell'area di copertura di
un master ascoltano le sue trasmissioni. Se uno slave, ascoltando
le trasmissioni ovvero i pacchetti, non riesce a decodificare il proprio
indirizzo in un certo pacchetto, non è autorizzato a trasmettere nel
prossimo slot slave-master. C'è la possibilità anche di inviare dei
pacchetti
broadcast, che possono essere ricevuti da tutti gli
slave in ascolto.
SCO
Un link SCO fornisce un collegamento simmetrico tra master e slave,
banda riservata all'interno del canale e scambio di dati su base periodica
sotto forma di slot riservati proprio per questo tipo di collegamento.
Perciò, un link SCO realizza un collegamento a
commutazione
di circuito tra master e slave. Un master può realizzare fino a 3
link SCO con 3 diversi slave contemporaneamente. Uno slave può realizzare
fino a 3 link SCO con lo stesso master oppure 2 con master diversi.
I pacchetti di un link SCO non vengono mai ritrasmessi. Uno slave
può sempre rispondere ad un pacchetto SCO, nello slot SCO riservato
alla risposta, anche se non è stato capace di decodificare il proprio
indirizzo nel pacchetto ricevuto. Un trasferimento periodico SCO può
essere interrotto solo da un messaggio broadcast del tipo LMP (
Link
Manager Protocol): solo in questo caso il master può trasmettere
in slot riservati SCO pacchetti diretti da qualche altra parte rispetto
alla destinazione dei pacchetti SCO. Ogni dispositivo dovrà programmare
il traffico ACL in modo da rispettare gli slot riservati al traffico
SCO. L'unica eccezione è, come detto, rappresentata dai pacchetti
di controllo del LMP che servono, tra l'altro, anche a chiudere un
link SCO qualora non sia più necessario.
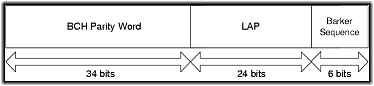
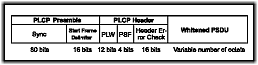
3.3.5 Struttura dei pacchetti Bluetooth
Ciascun pacchetto Bluetooth consiste di:
- Access Code
- Packet Header
- Payload24
Figure 3.7: Schema generale dei pacchetti Bluetooth
Access Code
Figure 3.8: Struttura dell'Access Code
Durante la connessione tra i dispositivi, quando un link (ACL o SCO)
è stato instaurato, l'access code serve ad identificare i pacchetti
che provengono da uno specifico master, poiché esso è derivato dal
BD_ADDR del master stesso. In questo modo, se uno slave attivo in
una piconet gestita da un master dovesse trovarsi contemporaneamente
nell'area di copertura di un altro dispositivo Bluetooth, ricevendo
quindi anche i pacchetti trasmessi da quest'ultimo, può distinguere
quali sono i pacchetti relativi alla propria piconet e scartare invece
quelli con un access code diverso, e tutto ciò semplicemente decodificando
68 (72) bit di access code anziché un pacchetto completo. La prima
parte dell'access code è un preambolo che serve a rilevare
i limiti dei dati ricevuti. Tale preambolo è "0101"
oppure "1010", in dipendenza del primo bit della
sync word. L'ultima parte dell'access code è il cosiddetto
trailer che è presente solo se il pacchetto che segue all'access
code in questione possiede un payload (esiste un tipo di pacchetto
costituito dal semplice access code, senza header né payload; in quel
caso l'access code è di 68 bit e non c'è il trailer).
Figure 3.9: Struttura della sync word
La figura
3.9 mostra la struttura della sync word
che è la parte essenziale dell'access code. La sync word possiede
delle particolari proprietà
25 che facilitano il compito del "correlatore",
ovvero del componente che il dispositivo Bluetooth in ricezione usa
per stabilire se il pacchetto che segue l'access code è significativo
oppure no. E' opportuno a questo proposito specificare i vari tipi
di access code che si possono incontrare nei pacchetti trasmessi usando
il protocollo Bluetooth :
- Channel Access Code (CAC) E' derivato dal LAP del BD_ADDR
del master e viene usato da tutti i dispositivi in quella piconet
durante lo scambio dei dati. Come detto precedentemente, è riconoscendo
il CAC della piconet che uno slave riconosce pacchetti eventualmente
ad esso indirizzati.
- Device Access Code (DAC) Il DAC è derivato dal LAP di uno specifico
slave ed è usato dallo stesso slave nella fase di Page Scan26 e dal master nella fase di Page27 verso quello slave specifico.
- General Inquiry Access Code (GIAC) Il GIAC è usato da tutti
i dispositivi durante le procedure di Inquiry28. Il suo valore è fissato dalle specifiche Bluetooth e vale 0x9E8B33.
- Dedicated Inquiry Access Code (DIAC) Ha la stessa funzione
del GIAC (inquiry) ma è usato per restringere la ricerca a particolari
classi di dispositivi Bluetooth (ad esempio si possono cercare solo
nuove stampanti, o PC o palmari).
Dunque, per concludere il discorso sull'access code, in dipendenza
dallo stato dell'unità Bluetooth, il correlatore si aspetterà un particolare
access code tra quelli appena visti. Se la correlazione con l'access
code di riferimento avrà dato risultato positivi, allora il dispositivo
Bluetooth continuerà ad ascoltare il resto del pacchetto.
Packet Header
Figure 3.10: Struttura del packet header
Il packet header contiene informazioni di controllo associate al pacchetto.
In totale l'header contiene 18 bit d'informazione, che vengono protetti
con un codice FEC (forward error correction) di 1/3, che replica
3 volte ciascun bit d'informazione. Questo livello di ridondanza è
necessario poiché le informazioni contenute nell'header sono importanti
ai fini del corretto funzionamento del link. Infine viene anche utilizzato
un controllo CRC (cyclic redundancy check) sull'header stesso
al fine di evitare il proseguimento della ricezione e codifica del
payload che segue nel caso il controllo CRC riesca. Vediamo ora in
dettaglio i vari campi dell'header.
- AM_ADDR
-
Durante la procedura di page, il
master assegnerà un Active Member Address allo slave. Questo
AM_ADDR costituirà un handle29 usato per indirizzare tutte le comunicazioni verso quello slave e
verrà usato dal master per distinguere le risposte dei diversi
slave. Il campo è di 3 bit e quindi é sufficiente per indirizzare
7 slave. Un AM_ADDR pari a "000" corrisponde
ad un pacchetto broadcast che verrà ricevuto da tutti gli slave della
piconet30.
- Packet Type
-
Questo campo definisce il
tipo di traffico trasportato dal pacchetto in questione (SCO,ACL,NULL
o POLL), il tipo di correzione d'errore adottata per il payload e
quanti slot occuperà il payload stesso.
- Flow
-
Questo campo funziona da flag per segnalare
che il dispositivo che sta inviando il pacchetto corrente non è
più in grado di ricevere dati a causa del riempimento del proprio
buffer di ricezione.
- ARQN e SEQN
-
Tramite il flag ARQN viene realizzato
il meccanismo di ARQ (automatic repeat request) di Bluetooth.
Questo meccanismo è previsto solo per i link ACL, mentre invece i
pacchetti di un link SCO non vengono mai ritrasmessi. Il suo funzionamento
è semplice: quando lo slave riceve correttamente il pacchetto inviatogli
dal master, pone il bit ARQN a 1 nel pacchetto che esso manda in risposta
al master. Basandosi su questa informazione, il master decide se trasmettere
un nuovo pacchetto o ritrasmettere lo stesso. Il master continuerà
a ritrasmettere lo stesso pacchetto finché non riceverà un'indicazione
sulla corretta ricezione del pacchetto stesso oppure finché non scadrà
un timeout. Il meccanismo è uguale per i pacchetti dal master
verso lo slave. Tutto ciò realizza un semplice algoritmo "stop
and wait" che aiuta a minimizzare l'overhead dovuto
alle ritrasmissioni. Sempre in questo contesto, il flag SEQN serve
ad informare il destinatario di un pacchetto quando quest'ultimo è
un pacchetto ritrasmesso oppure un pacchetto nuovo. Il bit SEQN viene
cambiato (toggled) ogni volta che viene trasmesso un pacchetto
nuovo. Il meccanismo ARQ appena descritto, può tuttavia causare un
certo ritardo variabile nel flusso dei dati. Alcuni tipi di link ammettono
un limite al massimo ritardo nel flusso dei dati: un ritardo dovuto
alle ritrasmissioni è accettato fino al suddetto limite, dopodiché
il dato viene abbandonato31. Nelle specifiche Bluetooth è definita un'operazione detta flushing,
con la quale s'interrompe il processo di ritrasmissione se si supera
un certo valore e si forza il dispositivo a trasmettere il dato successivo,
abbandonando quello corrente. Questa operazione è regolata da un timer,
il flushing timeout, che specifica in pratica per quanto tempo l'unità
può continuare a ritrasmettere un pacchetto prima di abbandonarlo
e passare al successivo. Sono possibili anche configurazioni estreme,
quali nessuna ritrasmissione e ritrasmissioni infinite.
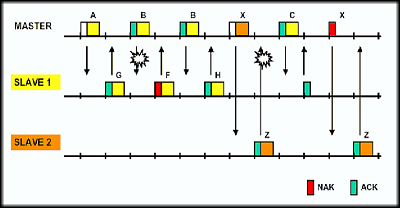
Figure 3.11: Meccanismo ARQ di Bluetooth
- Header Error Check(HEC)
- E' una funzione CRC a 8 bit applicata
all'header. Il polinomio generatore è :
Come abbiamo visto, il fallimento del controllo HEC permette ad un
dispositivo ricevente di ignorare il resto del pacchetto.
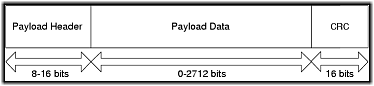
Payload ACL
Figure 3.12: Struttura del payload ACL
Il payload ACL è diviso in 3 parti :
- Payload Header
-
L'header del payload di un pacchetto ACL è a sua volta composto dai
seguenti campi :
- L_CH
-
Bluetooth definisce 4 canali logici realizzati
tramite i link SCO e ACL. Non vengono usati spesso in letteratura
sebbene siano importanti per capire le differenze tra i contenuti
dei diversi pacchetti e quindi capire le differenze tra le varie informazioni
che essi trasportano (vedi tabella 3.4).
- LC (Link Control)
Questo canale logico viene realizzato dall'header di pacchetto e
consiste nei dati ARQ, SEQ e i dati di controllo associati. Come detto
precedentemente, questi dati sono fondamentali per il mantenimento
del link.
- LM (Link Manager)
Questo canale viene realizzato tramite un payload ACL dedicato e
contiene dati di controllo LM (link manager) che vengono scambiati
tra le due entità LM (locale e remota). Tipicamente viene realizzato
tramite un pacchetto comune ai link SCO e ACL32 in modo che le informazioni LM possano essere trasportate anche durante
l'attività di un link SCO.
- UA/UI (User Asynchronous data/User Isochronous data)
Questo canale viene realizzato tramite il payload ACL e contiene
dati provenienti dal livello L2CAP, che si occupa, tra l'altro, anche
della segmentazione e riassemblaggio dei pacchetti. A questo proposito,
la frammentazione è indicata da con un particolare valore di
L_CH :
- L_CH=10 per il pacchetto iniziale
- L_CH=01 per un pacchetto "continuazione"
- US (User Synchronous)
Questo canale viene realizzato tramite il payload dei pacchetti SCO.
- flow
-
Questo flag controlla il trasferimento
dei dati a livello L2CAP(logical link control and adaptation
layer)
- lenght
-
Questo campo specifica la lunghezza
in byte del payload stesso.
| L_CH | Canale logico | Descrizione |
| 00 | N/D | Non definito |
| 01 | UA/UI | Frammento di continuazione di un messaggio L2CAP |
| 10 | UA/UI | Inizio di un messaggio L2CAP oppure messaggio senza frammentazione |
| 11 | LM | Comando LMP |
Table 3.4: Contenuto del campo L_CH
Struttura pacchetti SCO
I pacchetti SCO hanno lo stesso access code e header dei pacchetti
ACL
33, anche se i campi flow, ARQ e SEQ sono ridondanti perchè per
il link SCO non è previsto il controllo sul flusso dei dati e
lo schema di ritrasmissione visto per ACL; manca anche il campo CRC.
La lunghezza del payload è fissata a 30 byte, ove il contenuto
informativo può essere 10, 20 o 30 byte a seconda del rapporto
FEC usato (1/3, 2/3 o nessun FEC).
Struttura del pacchetto misto ACL/SCO
Figure 3.13: Struttura del pacchetto DV
Il pacchetto chiamato DV è un pacchetto speciale utilizzato nei
link di tipo SCO. Esso può trasportare fino a 10 byte di informazioni
di tipo voice, come si vede dalla figura. Il campo voice field
non può essere ritrasmesso e ad esso non è applicato alcun
metodo FEC. Questo pacchetto trasporta anche fino a 9 byte (72 bit)
di informazioni di tipo data. Il campo data field è protetto
da un FEC 2/3 (5 bit di parità vengo aggiunti ad ogni blocco di 10
bit) , un campo CRC e i soliti campi flow, ARQ e SEQ. La ritrasmissione
della porzione data è possibile e avviene sempre tramite un altro
pacchetto DV nello stesso link SCO.
Pacchetti di controllo: ID, POLL, NULL e FHS
Bluetooth prevede 4 pacchetti di controllo: ID, POLL, NULL e FHS.
Essi sono comuni a entrambi i tipi di link, SCO e ACL. Vengono usati
per la sincronizzazione, e per altre funzioni di controllo del canale
che verranno esaminate in seguito.
| Tipo di pacchetto | Dimensione | Contenuto | Uso |
| ID | 68 bit | Access code | inquiry, page e relative risposte |
| NULL | 26 bit | Access code+header | ARQ e controllo del flusso |
| POLL | 126 bit | Access code+header | Poll periodico degli slave |
| FHS | 366 bit | Clock e BD_ADDR della sorgente | Sincronizzazione |
Table 3.5: Pacchetti speciali
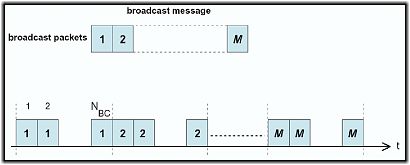
Trasmissione Broadcast
Il master può mandare dati contemporaneamente
a tutti gli slave attivi in una piconet (
broadcast). Ciò viene
fatto mettendo nel campo AM_ADDR tutti e 3 i bit a 0. Visto che un
pacchetto broadcast è diretto verso più slave, non è applicabile l'algoritmo
ARQ visto a pagina
30. Al posto di quest'ultimo algoritmo
si irrobustisce la trasmissione broadcast semplicemente ripetendo
sempre un pacchetto broadcast un certo numero di volte. Il flag ARQN
non viene usato, al contrario del flag SEQN che viene usato per indicare
la ritrasmissione di uno stesso pacchetto broadcast. Un messaggio
broadcast viene scomposto in un certo numero di pacchetti Bluetooth
e ciascun pacchetto viene ripetuto
NBC.
Figure 3.14: Trasmissione di pacchetti broadcast
3.3.6 Prestazioni di un link Bluetooth a livello baseband
Le tabelle
3.6 e
3.7, riassumono
i pacchetti Bluetooth utilizzati a livello banda base:
| Tipo | Payload header(bytes) | Numero di slot | User payload(bytes) | FEC | CRC | Max trasferimento simmetrico(kb/s) | Max trasferimento asimmetrico-forward (kb/s) | Max trasferimento asimmetrico-reverse (kb/s) |
| DM1 | 1 | 1 | 0-17 | 2/3 | si | 108.8 | 108.8 | 108.8 |
| DH1 | 1 | 1 | 0-27 | no | si | 172.8 | 172.8 | 172.8 |
| DM3 | 2 | 3 | 0-121 | 2/3 | si | 258.1 | 387.2 | 54.4 |
| DH3 | 2 | 3 | 0-183 | no | si | 390.4 | 585.6 | 86.4 |
| DM5 | 2 | 5 | 0-224 | 2/3 | si | 286.7 | 477.8 | 36.3 |
| DH5 | 2 | 5 | 0-339 | no | si | 433.9 | 723.2 | 57.6 |
| AUX1 | 1 | - | 0-29 | no | no | 185.6 | 185.6 | 185.6 |
| Tipo | Payload header(bytes) | User payload (bytes) | FEC | CRC | Max trasferimento simmetrico (kb/s) |
| HV1 | n/d | 10 | 1/3 | no | 64.0 |
| HV2 | n/d | 20 | 2/3 | no | 64.0 |
| HV3 | n/d | 30 | no | no | 64.0 |
| DV | 1 D | 10+(0-9)D | 2/3 D | si D | 64.0+57.6 D |
I diversi pacchetti ACL, attraverso la presenza o assenza di FEC e
CRC e tramite le diverse dimensioni dei payload, mediano tra un basso
throughput con una maggiore robustezza del link e tra un più alto
throughput con una minore robustezza del link. Una maggiore protezione
contro gli errori implica una maggiore ridondanza dei dati, mentre
i pacchetti più lunghi (ad esempio Dx3/Dx5 con x=H o M) sono più suscettibili
agli errori data la loro maggiore permanenza sul mezzo trasmissivo.
I pacchetti SCO usano un livello crescente di correzione d'errore,
aggiungendo ridondanza ai dati e perciò robustezza al link. E' il
Link Manager (LM) che, controllando costantemente la qualità e l'affidabilità
di un link, decide quale tipo di pacchetto è appropriato in un dato
istante. Alcuni dispositivi non supporteranno alcuni tipi di pacchetti,e
quindi, al momento dell'inizializzazione del link, ci sarà bisogno
di una accordo su quest'aspetto.
Il throughput simmetrico è ottenuto usando lo stesso tipo di pacchetti
in entrambe le direzioni (master to slave e slave to master). Comunque,
molte applicazioni richiedono un'occupazione di banda asimmetrica
e quindi, in generale, un link può trasportare un tipo di pacchetti
in una direzione e un altro tipo nell'altra direzione. Perciò, il
throughput massimo pari a 732 kb/s può essere ottenuto usando pacchetti
di 5 slot in una direzione e pacchetti mono slot a 57.6 kb/s nell'altra.
Il massimo throughput simmetrico, ovvero 433.9 kb/s, può essere ottenuto
usando pacchetti DH5 in entrambe le direzioni.
3.3.7 Supervisione del link
Sia il master che lo slave, posseggono un timer,
Tsupervision,
che viene inizializzato col valore
supervisionTO e viene resettato
ogni volta che viene ricevuto un pacchetto che contiene il giusto
AM_ADDR e che passa con successo il controllo HEC. Viene usato lo
stesso timeout per SCO e ACL. Il valore
supervisionTO è negoziato
dalle due unità Bluetooth a livello LM. Il suo valore dev'essere maggiore
dei periodi di
hold e
sniff (vedi
3.4.14
e
3.4.15). Per default il valore
supervisionTO
è pari a 20s, ma può essere impostato con un comando HCI (
host
controller interface) ad un qualsiasi valore tra 0.625 μ
s e
40.9s. Per quel che riguarda gli slave in modalità
park, la
supervisione del link viene effettuata con periodiche operazioni di
unpark e park (vedi
3.4.16)
La funzione del link controller (LC) comincia dove finisce l'azione
del processore baseband
34. Vedremo come il link controller configura e gestisce i link e il
livello sottostante (baseband). Il link controller di un dispositivo
Bluetooth si occupa di realizzare operazioni visibili ad alto livello
come l'inquiry e il page e gestisce i link con i diversi dispositivi,
anche con quelli situati in altre piconet.
3.4.1 Stati del link controller
In un dato istante di tempo, un'unità Bluetooth può trovarsi
in uno dei seguenti stati :
- Stati Principali
- Sottostati
- Page
- Page Scan
- Inquiry
- Inquiry Scan
- Master Response
- Slave Response
- Inquiry Response
Questi sottostati sono stati temporanei, usati per costruire una nuova
piconet oppure per aggiungere nuovi slave ad una piconet esistent.
In particolare:
- Inquiry e Inquiry Scan sono dedicati alla ricerca di nuovi dispositivi.
Un dispositivo Bluetooth che volesse scoprire nuovi dispositivi nel
proprio raggio di trasmissione, dovrebbe compiere un processo di inquiry
e scoprirebbe i dispositivi che contemporaneamente volessero farsi
scoprire trovandosi in inquiry scan. Durante l'inquiry, il dispositivo
raccoglie informazioni utili per realizzare successivamente delle
connessioni con i dispositivi scoperti.
- Inquiry Response è lo stato in cui si porta un dispositivo scoperto
durante le fasi precedenti, per trasmettere delle informazioni utili
sul proprio stato(CLKN, BD_ADDR) al dispositivo che lo ha scoperto
(inquiry).
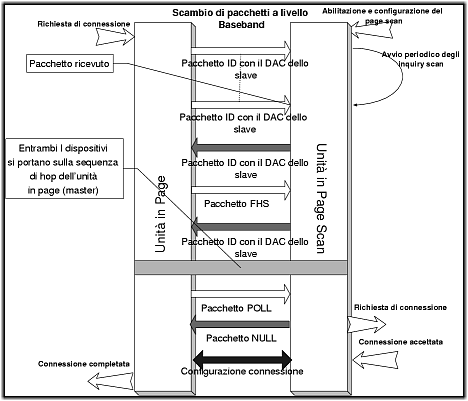
- Page, Page Scan, Master Response e Slave Response sono dedicati alla
realizzazione di una nuova connessione tra 2 dispositivi Bluetooth.
La creazione di tale connessione viene facilitata dalla conoscenza
reciproca di parametri quali CLKN e BD_ADDR dei 2 dispositivi.
La figura seguente mostra qual' è in generale il percorso che viene
seguito da 2 unità Bluetooth, dallo standby alla creazione di una
connessione e quindi di una piconet.
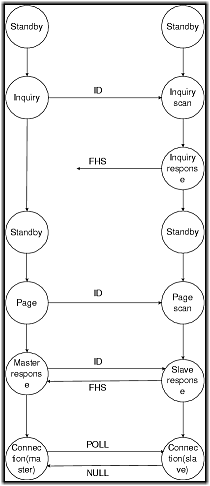
Figure 3.15: Bluetooth: da Standby a Connection
Bisogna notare che lo standard Bluetooth non impone la suddetta successione
degli stati, nel senso che, se ad esempio disponiamo di due o più
dispositivi Bluetooth, probabilmente dello stesso costruttore, che
si conoscono a vicenda, ovvero che conoscono i rispettivi BD_ADDR,
non c'è bisogno di effettuare la procedura di Inquiry e si può passare
direttamente alla fase di page. Questa possibilità è stata resa disponibile
per realizzare interfacce MMI (Man Machine Interface) minimali.
3.4.2 Sequenze di hopping
Bluetooth specifica diverse sequenze di hopping associate ai suddetti
stati e sottostati. A parte lo stato Standby, a cui non è associata
nessuna sequenza di hopping
35, sono definite 10 diverse sequenze, 5 per i sistemi realizzati per
i paesi in cui sono a disposizione 79 canali e altre 5 per i sistemi
realizzati per i paesi in cui sono a disposizione solo 23 canali.
Usando la notazione () come riferimento ai paesi con un insieme ridotto
di canali disponibili, le diverse sequenze definite dallo standard
Bluetooth sono:
- Page hopping sequence: costituita da 32 (16) diverse frequenze
scelte fra le 79 disponibili. Questa sequenza è periodica e il
periodo è proprio 32 (16).
- Page response sequence: costituita da 32 (16) frequenze in
corrispondenza biunivoca con quelle della page hopping sequence.
- Inquiry sequence: costituita da 32 (16) frequenze scelte fra
le 79 disponibili. Questa sequenza è periodica e il periodo è
proprio 32 (16).
- Inquiry sequence: costituita da 32 (16) frequenze in corrispondenza
biunivoca con quelle della inquiry hopping sequence.
- Channel hopping sequence: sequenza utilizzata nello stato Connection,
costituita da 79 (23) frequenze distribuite nella banda disponibile.
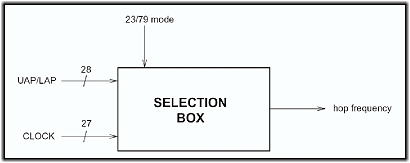
3.4.3 Schema generale per la generazione delle sequenze di hopping
In generale, lo schema di selezione consiste
in due fasi:
- selezione di una sequenza
- mappatura della sequenza selezionata nelle frequenze
Figure 3.16: Schema della selezione delle frequenze di hop
Gli ingressi sono il clock e l'indirizzo corrente. In particolare,
nello stato connection, l'indirizzo è quello del master della
piconet e anche il clock (CLKN) è il CLKN del master (CLK). Sempre
in connection, vengono usati solo i 27 bit più significativi
(MSB) del clock, mentre per i sottostati page e inquiry vengono usati
tutti e 28 i bit. Inoltre, durante la fase di page, viene usato il
clock stimato(CLKE). L'indirizzo usato è composto da 28 bit che
comprendono sia l'intero UAP che l'intero LAP
36; in connection viene usato l'indirizzo del master, in page viene
usato l'indirizzo dello slave sottoposto alla procedura di page e
in inquiry viene usato il GIAC
37 per generare i campi UAP e LAP. L'uscita è una sequenza pseudocasuale
di 79 (23) frequenze disponibili.
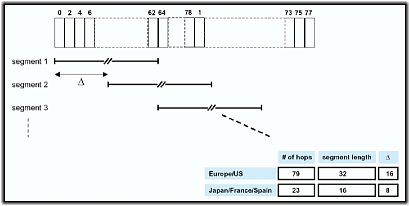
Per i sistemi che utilizzano l'intero insieme delle frequenze disponibili
(79), il meccanismo di selezione sceglie un "segmento"
di 32 frequenze di hopping che coprono una banda di circa 64Mhz e
le utilizza in ordine casuale. In seguito viene scelto un altro segmento
da 32 frequenze di hop e il processo continua. Nei sottostati page,
page scan, page response viene usato sempre lo stesso segmento da
32 frequenze di hop
38. Il segmento viene scelto tramite l'indirizzo, quindi unità
diverse avranno segmenti diversi. Possiamo vedere il meccanismo appena
descritto nella figura seguente (gli ingressi saranno definiti volta
per volta, per la varie fasi):
Figure 3.17: Selezione degli hop nello stato CONNECTION
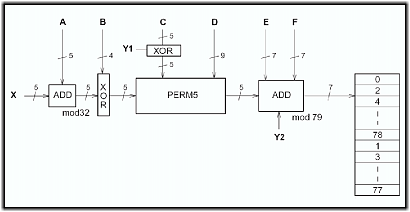
Selection Kernel
Il
selection kernel è il sistema che realizza il meccanismo
di selezione. La figura seguente rappresenta lo schema a blocchi per
i sistemi che usano sequenze di 79 hop.
39
Figure 3.18: Selection Kernel per i sistemi a 79 hops
Questo è lo stato di "`
default"' per
un dispositivo Bluetooth. Quest'ultimo risulta inattivo, non viene
scambiato alcun tipo di dati e la sezione radio è spenta; solo il
contatore che realizza il native clock è attivo. Questo stato è usato
di solito per realizzare un funzionamento a basso consumo di potenza
(
low-power mode).
Procedura di inquiry
Questa procedura, realizzata tramite i sottostati inquiry, inquiry
scan e inquiry response, viene definita dallo standard Bluetooth per
consentire applicazioni in cui l'unità sorgente non conosce l'indirizzo
dell'unità destinataria. Un'applicazione possibile è, come abbiamo
detto precedentemente, la scoperta di altri dispositivi Bluetooth
nel proprio raggio di trasmissione/ricezione. Durante la fase di inquiry,
l'unità che compie tale fase raccoglie i BD_ADDR e i clock attuali
di tutte le unità che le rispondono, ovvero quelle che contemporaneamente
si trovano nella fase di inquiry scan; infatti la fase di inquiry
scan è la fase corrispondente usata da un dispositivo Bluetooth che
intende farsi scoprire. Successivamente, l'unità che ha concluso con
successo la procedura di inquiry, può decidere di creare una o più
nuove connessioni con le unità scoperte, utilizzando la procedura
di page che vedremo in seguito.
Un'unità che vuole scoprire altre unità Bluetooth entra dunque nel
sottostato inquiry, durante il quale trasmette ripetutamente il messaggio
di inquiry; tale messaggio non contiene alcuna informazione sull'unità
che lo sta inviando ed è costituito da un pacchetto ID il cui access
code è pari al valore GIAC
40. La trasmissione dei suddetti pacchetti avviene usando diverse frequenze
in accordo alla sequenza di inquiry precedentemente definita
41. Un'unità che vuole farsi scoprire, al contrario, entra nel sottostato
inquiry scan per rispondere ad eventuali messaggi di inquiry. La risposta
ai messaggi di inquiry è opzionale, ovvero un'unità Bluetooth non
è costretta a rispondere ai messaggi di inquiry. Descriveremo ora
lo scambio dei messaggi durante questa procedura e la soluzione al
problema delle collisioni nella risposta ai messaggi di inquiry.
Nel sottostato inquiry scan un'unità Bluetooth ascolta i pacchetti
trasmessi sul canale alla ricerca di messaggi di inquiry. La durata
della fase di scan è indicata come
Tw\textunderscore inquiry\textunderscore scan,
ed è sufficiente a coprire 16 frequenze di inquiry (circa 20s). Quando
un'unità entra nel sottostato inquiry scan, essa seleziona una
frequenza per lo scan in accordo alla inquiry hopping sequence.
| X | Y1 | Y2 | A | B | C | D | E | F |
| Xir4−0(79) | 0 | 0 | A27−23 | A22−19 | A8,6,2,4,2,0 | A18−10 | A13,11,9,7,5,3,1 | 0 |
Table 3.8: Ingressi al selection kernel per la fase di inquiry scan
La sequenza sarà generata tramite il GIAC e un altro parametro
detto DCI (
default check initialization) che vale 0x00: infatti
gli ingressi
A27−24 sono proprio i 4 LSB del DCI, mentre i rimanenti
bit dell'ingresso A sono il LAP del GIAC. La fase nella sequenza è
determinata dall'ingresso X e quindi, come si vede dalla tabella,
tale fase cambia ogni 1.28s, ovvero ogni 1.28s viene selezionata una
nuova frequenza di scan. L'inquiry hopping sequence è divisa
in due insiemi di frequenze, che Bluetooth chiama "treni",
A e B costituiti da 16 frequenze ciascuno. Se viene ricevuto un messaggio
di inquiry durante il periodo
Tw\textunderscore inquiry\textunderscore scan,
l'unità compie un backoff
42 portandosi in connection o in standby prima di entrare ancora nel
sottostato inquiry scan. La durata del backoff è determinata in maniera
casuale e può variare da 1 a 1023 slot (circa 0.64s). Dopo aver effettuato
tale backoff, l'unità entra nel sottostato inquiry response. Il sottostato
inquiry scan può essere raggiunto sia dallo stato standby che dallo
stato connection. Nel primo caso, non vi sono connessioni attive cosicché
l'unità può sfruttare tutta la capacità
43 del canale per effettuare l'inquiry scan. Nel caso in cui l'unità
si trovi nello stato connection e voglia effettuare una procedura
di inquiry scan, può ottenere una capacità maggiore utilizzando delle
modalità speciali in cui possono essere posti i link ACL e che vedremo
in seguito. Nel caso siano presenti dei link SCO, questi ultimi hanno
priorità sulle procedure di inquiry. Saranno comunque utilizzati i
pacchetti SCO con la minore occupazione di banda (HV3). Sempre in
questo caso, è opportuno che il dispositivo aumenti la dimensione
di
Tw\textunderscore inquiry\textunderscore scan, per aumentare
la probabilità di rispondere ad un messaggio di inquiry. In termini
quantitativi, se è presente un solo link SCO con pacchetti HV3 e
TSCO=6
slot,
Bluetooth raccomanda una finestra di scan (
Tw\textunderscore inquiry\textunderscore scan)
di almeno 36 slot (22.5ms); se sono presenti 2 link SCO con pacchetti
HV3 e
TSCO=6
slot, Bluetooth raccomanda invece una finestra di
scan di almeno 54 slot (33.75ms).
Bluetooth definisce inoltre Tinquiryscan, l'intervallo di tempo
che intercorre tra due periodi (finestre) consecutivi di inquiry scan.
Questo Tinquiryscan dovrà essere al massimo 2,56s.
Il sottostato inquiry viene usato quando un'unità vuole scoprire nuovi
dispositivi. Osserviamo la seguente figura:
Figure 3.19: Ciclo TX/RX in Inquiry
Le frequenze TX e RX seguono rispettivamente la sequenza inquiry hopping
sequence e inquiry response sequence. Queste sequenze vengono determinate
sempre a partire dal GIAC e dal CLKN dell'unità che compie l'inquiry.
Osserviamo la seguente tabella:
| X | Y1 | Y2 | A | B | C | D | E | F |
| Xi4−0(79) | CLKN1 | 32×CLKN1 | A27−23 | A22−19 | A8,6,2,4,2,0 | A18−10 | A13,11,9,7,5,3,1 | 0 |
Table 3.9: Ingressi al selection kernel per la fase di inquiry
L'ingresso X è definito così:
|
Xi(79)=[CLKN16−12+koffset+(CLKN4−2,0−CLKN16−12)mod16]mod32 |
| (3.1) |
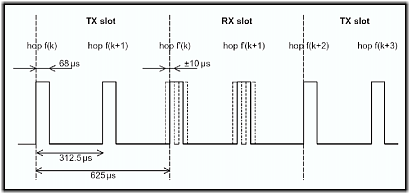
Come si vede dalla figura
3.19, in ogni
slot TX il master trasmetterà in sequenza su due frequenze di
hop. Ciò è possibile poichè il messaggio di inquiry
è costituito dal solo pacchetto ID (68 bit) e quindi il sintetizzatore
di frequenze ha almeno 224μ
s per cambiare la frequenza. Nello
slot RX seguente, il master ascolterà in sequenza su due frequenze
selezionate in accordo alla inquiry response sequence. Quest'ultima
sequenza è strettamente correlata alla inquiry hopping sequence:
per ogni hop della inquiry hopping sequence vi è un corrispondente
hop della inquiry response sequence. In questo sottostato, per permettere
la trasmissione di due pacchetti per ogni TX slot, l'hop-rate del
sintetizzatore viene esattamente raddoppiato, passando dai 1600 hops/s
a 3200 hops/s. Le risposte ai messaggi di inquiry sono costituite
da pacchetti FHS. Una volta ricevuta una risposta, essa viene letta
dopodiché l'unità continua il processo di inquiry. Quindi, un'unità
in fase di inquiry non comunica la ricezione di una risposta all'unità
in inquiry scan che ha inviato la risposta stessa. Anche per la fase
di inquiry vengono definiti i due treni, A e B. Ognuno di questi treni
ha una durata di 10ms
44 e un singolo treno dev'essere ripetuto per
Ninquiry=256 volte
prima di poter passare alla scansione delle frequenze dell'altro treno.
La procedura di inquiry prosegue fino all'arresto da parte del LM
(quando decide di aver raccolto un numero sufficiente di risposte)
oppure quando viene esaurito un time-out (inquiryTO). Il sottostato
inquiry può essere raggiunto sia dallo stato standby che dallo
stato connection. Nel primo caso, non vi sono connessioni attive cosicché
l'unità può sfruttare tutta la capacità del canale per effettuare
l'inquiry. Nel caso in cui l'unità si trovi nello stato connection,
essa deve guadagnare la massima capacità possibile per effettuare
l'inquiry. Viene espressamente raccomandato di utilizzare alcune modalità
speciali per le connessioni ACL (come già accennato nel caso
dell'inquiry scan). Anche in questo caso, eventuali link SCO hanno
priorità sull'inquiry. Per guadagnare comunque una capacità
sufficiente per l'inquiry, è consigliabile utilizzare pacchetti
SCO di tipo HV3. A seconda del numero di link SCO presenti, si dovrà
anche aumentare Ninquiry.
| Nessun link SCO | 1 link SCO(HV3) | 2 link SCO(HV3) |
| Ninquiry | ≥ 256 | ≥ 512 | ≥ 768 |
Table 3.10: Inquiry-Incremento delle ripetizioni dei treni in presenza di link
SCO
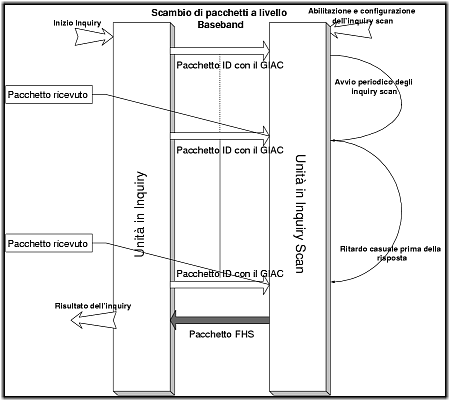
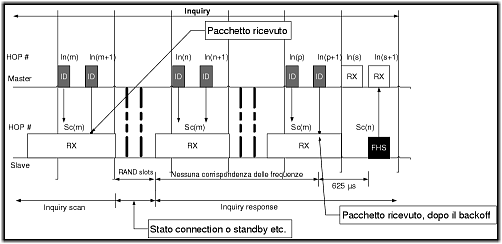
La procedura di inquiry prevede una risposta solo da parte dello slave.
Il master manda infatti i messaggi di inquiry e nel frattempo ascolta
per ricevere risposta, ma dopo la lettura delle risposte continua
a trasmettere messaggi di inquiry. Quando uno slave che si trova in
inquiry scan riceve un messaggio di inquiry, esso restituisce in risposta
un pacchetto FHS contenente i propri parametri. A questo punto, le
specifiche Bluetooth prevedono una procedura di back-off che l'unità
in inquiry scan deve effettuare prima di inviare la risposta al master;
questo per evitare un classico problema di collisione. Infatti, il
processo di inquiry non è direttamente indirizzato ad un particolare
slave, e così può accadere che due o più slave si trovino
contemporaneamente in inquiry scan e quindi possano potenzialmente
rispondere entrambi ai messaggi di inquiry di un master nel loro range.
Ovviamente tale possibilità è abbastanza remota: due slave
dovrebbero essere in inquiry scan nello stesso momento e, per di più,
dovrebbero essere in ascolto sulla stessa frequenza nello stesso momento.
Ricordiamo che la fase nella inquiry hopping sequence è determinata
del CLKN dell'unità, ovvero la frequenza iniziale di inquiry
scan, nonché il treno cui questa frequenza appartiene, viene determinata
dal valore di CLKN nel momento in cui si attiva l'inquiry scan. I
CLKN di due unità non sincronizzate sono in genere diversi e
quindi è difficile che si possa verificare un evento favorevole
alla collisione suddetta. Comunque, al fine di evitare la collisione,
viene effettuato il seguente processo:
- Se uno slave in inquiry scan riceve un messaggio di inquiry, seleziona
un numero casuale RAND compreso tra 0 e 1023.
- Lo slave ritorna in connection o standby per un numero di slot pari
a RAND (quindi dopo un tempo compreso tra 0 e 0.64s).
- Dopo questo back-off, lo slave ritorna nel sottostato inquiry scan.
Se riceve ancora un altro messaggio di inquiry, esso passa nel sottostato
inquiry response e invia un pacchetto FHS45 esattamente 625μs dopo aver ricevuto il messaggio di inquiry.
Se al rientro dal back-off non viene rilevato un nuovo messaggio di
inquiry per un tempo pari a
inqrespTO46, lo slave ritorna in standby o in connection. Se invece esso riceve
un messaggio di inquiry e invia in risposta il pacchetto FHS, aggiunge
1 alla fase della inquiry hopping sequence e rientra nel sottostato
inquiry scan. Se viene ricevuto un nuovo messaggio di inquiry, la
procedura viene ripetuta, back-off compreso (il valore RAND verrà
ricalcolato).
Eventuali link SCO hanno la priorità, cioè se la risposta
(FHS) ad un inquiry si sovrappone ad uno slot SCO, essa non viene
mandata ma si aspetta la ricezione di un altro messaggio di inquiry.
Per ciò che riguarda la generazione della sequenza di hopping
utilizzata nel sottostato inquiry response osserviamo la seguente
tabella:
| X | Y1 | Y2 | A | B | C | D | E | F |
| Xi4−0(79) | 1 | 32×1 | A27−23 | A22−19 | A8,6,2,4,2,0 | A18−10 | A13,11,9,7,5,3,1 | 0 |
Table 3.11: Ingressi al selection kernel per la fase di inquiry response
L'ingresso X è così definito:
|
Xir(79)=[CLKN16−12+N]mod32 |
| (3.2) |
Il valore di N viene incrementato dopo ogni trasmissione di un pacchetto
FHS in risposta ad un inquiry. Non vi sono restrizioni al valore iniziale
di N. Per quel che riguarda gli ingressi A, vengono ricavati a partire
dal LAP del GIAC e dai 4 bit meno significativi(LSB) del DCI(
A27−24).
Osserviamo ora una figura che riassume lo scambio di messaggi durante
la procedura di inquiry:
Figure 3.20: Cronologia eventi e pacchetti della procedura di inquiry
Nella figura seguente invece, viene visualizzata la procedura di inquiry
nel dominio del tempo.
Figure 3.21: La procedura di inquiry nel dominio del tempo
Procedura di Page
Con la procedura di page viene stabilita una connessione. Per stabilire
tale connessione è necessario conoscere solo il BD_ADDR del
destinatario, mentre la conoscenza del CLKN del destinatario è
utile per accelerare la procedura di page. Un'unità che stabilisce
una connessione, attraverso la procedura di page, diviene automaticamente
il master della connessione. Il processo di page può seguire
diversi "schemi" di paging. Bluetooth definisce
uno schema di paging obbligatorio, ovvero che dev'essere implementato
da tutti i dispositivi compatibili Bluetooth. Questo schema è
usato quando due unità Bluetooth si incontrano per la prima volta
e prevede che il processo di page segua immediatamente il processo
di inquiry. Due unità, una volta connesse, possono mettersi d'accordo
decidendo di adottare uno schema di paging diverso. Considereremo
solo lo schema di paging obbligatorio.
Nel sottostato page scan, un'unità Bluetooth ascolta il canale
alla ricerca di pacchetti di page ad esso indirizzati, ovvero pacchetti
ID il cui access code è uguale al proprio DAC. La durata del
periodo di scan è indicata con
Twpagescan e sarà sufficiente
a coprire 16 frequenze di page, cioè circa 20 secondi. Quando un'unità
entra nel sottostato page scan, essa seleziona una frequenza per lo
scan in accordo alla page hopping sequence.
| X | Y1 | Y2 | A | B | C | D | E | F |
| CLKN16−12 | 0 | 0 | A27−23 | A22−19 | A8,6,2,4,2,0 | A18−10 | A13,11,9,7,5,3,1 | 0 |
Table 3.12: Ingressi al selection kernel per la fase di page scan
La sequenza sarà generata a partire dal BD_ADDR dell'unità
(ingressi A nella tabella precedente). La fase nella sequenza è
determinata dai bit CLKN16−12 (ove CLKN è il clock nativo
dell'unità che compie lo scan) e quindi tale fase cambia ogni
1.28s, ovvero ogni 1.28s viene selezionata una nuova frequenza di
scan.
Il sottostato page scan può essere raggiunto sia dallo stato standby
che dallo stato connection. Nel primo caso, non vi sono connessioni
attive cosicché l'unità può sfruttare tutta la capacità del canale
per effettuare il page scan. Nel caso in cui l'unità si trovasse nello
stato connection e volesse effettuare una procedura di page scan,
può ottenere una capacità maggiore utilizzando delle modalità speciali
in cui possono essere posti i link ACL. Nel caso siano presenti dei
link SCO, questi ultimi hanno priorità sulle procedure di page scan.
Saranno comunque utilizzati i pacchetti SCO con la minore occupazione
di banda (HV3). Sempre in questo caso, è opportuno che il dispositivo
aumenti la dimensione di Tw\textunderscore page\textunderscore scan,
per aumentare la probabilità di rispondere ad un messaggio di page.
In termini quantitativi, se è presente un solo link SCO con pacchetti
HV3 e TSCO=6slot, Bluetooth raccomanda una finestra di scan
di almeno 36 slot (22.5ms); se sono presenti 2 link SCO con pacchetti
HV3 e TSCO=6slot, Bluetooth raccomanda invece una finestra di
scan di almeno 54 slot (33.75ms).
Bluetooth definisce inoltre Tpagescan, l'intervallo di tempo
che intercorre tra due periodi (finestre) consecutivi di page scan.
Le specifiche Bluetooth prevedono 3 tipi di scan in relazione proprio
al valore assunto da Tpagescan. Queste 3 possibilità determineranno
anche il comportamento dell'unità che realizzerà un page
verso questa unità in page scan. Osserviamo a questo proposito
la seguente tabella:
| Valore di SR | Tpagescan | Npage |
| R0 | continuo | ≥ 1 |
| R1 | ≤ 1.28s | ≥ 128 |
| R2 | ≤ 2.56s | ≥ 256 |
| riservato | - | - |
Table 3.13: Page scan-Relazione tra Tpagescan, Npage e le modalità
di page R0, R1 e R2
Come si vede dalla tabella
3.13, le modalità di page
scan sono distinte in base al valore di
Tpagescan, che può
essere esattamente uguale a
Tw\textunderscore page\textunderscore scan,
nel qual caso lo scan risulta continuo, oppure
Tpagescan può
essere minore o uguale a 1,28s o 2,56s. Sempre dalla tabella osserviamo
che il valore di
Tpagescan influenza il comportamento dell'unità
che vorrà effettuare una procedura di page diretta verso l'unità
che risulta in page scan, nel senso che a seconda della durata di
Tpagescan andrà aggiustato il valore
Npage ovvero
il numero delle ripetizioni relative alle trasmissioni dei messaggi
di page usando le frequenze dei due treni A e B. L'informazione sul
valore di
Tpagescan viene inviata anch'essa nel pacchetto FHS
47.
Il sottostato page è usato dal master (sorgente della connessione)
per creare una connessione verso uno specifico slave (destinatario
della connessione), il quale periodicamente si porta nel sottostato
page scan per ricevere richieste di connessione. Il master tenta di
raggiungere lo slave trasmettendo ripetutamente e su diversi canali
pacchetti ID il cui access code è pari al DAC dello slave. Per
realizzare tale procedura, per prima cosa il master usa il BD_ADDR
dello slave che vuole raggiungere per ricavare la page hopping sequence,
che sarà usata dallo slave quando entrerà nel sottostato
page scan
48. Per quel che riguarda la fase nella suddetta frequenza, il master
usa una stima del clock dello slave (CLKE) per fare una previsione
sulla frequenza alla quale lo slave destinatario inizierà la
fase di page scan. Per la temporizzazione TX/RX dei messaggi di page
si può far riferimento alla figura
3.19.
In maniera simile a quanto visto per la fase di inquiry, in ogni slot
TX il master trasmetterà in sequenza su due frequenze di hop.
Ciò è possibile poichè il messaggio di page è
costituito dal solo pacchetto ID (68 bit) e quindi il sintetizzatore
di frequenze ha almeno 224μ
s per cambiare la frequenza. Nello
slot RX seguente, il master ascolterà in sequenza su due frequenze
selezionate in accordo alla page response hopping sequence. Quest'ultima
sequenza è strettamente correlata alla page hopping sequence:
per ogni hop della page hopping sequence vi è un corrispondente
hop della page response hopping sequence. In questo sottostato, per
permettere la trasmissione di due pacchetti per ogni TX slot, l'hop-rate
del sintetizzatore viene raddoppiato, passando dai 1600 hops/s a 3200
hops/s.
Inoltre, come abbiamo visto per tutte le fasi precedenti, anche per
la fase di page le 32 frequenze dedicate della page hopping sequence
vengono divise in due treni A e B da 16 frequenze ciascuno. Osserviamo
la seguente tabella:
| X | Y1 | Y2 | A | B | C | D | E | F |
| Xp4−0(79) | CLKE1 | 32×CLKE1 | A27−23 | A22−19 | A8,6,2,4,2,0 | A18−10 | A13,11,9,7,5,3,1 | 0 |
Table 3.14: Ingressi al selection kernel per la fase di page
L'ingresso X è così definito:
|
Xp(79)=[CLKE16−12+koffset+(CLKE4−2,0−CLKE16−12)mod16]mod32 |
| (3.3) |
Nel sottostato page il master inizierà la trasmissione dei messaggi
di page usando le frequenze del treno A così definite:
|
{ f(k−8),...,f(k),...,f(k−7)} |
| (3.4) |
dove f(k) è la frequenza, stimata dal master in base alle informazioni
su quel particolare slave ottenute durante la fase di inquiry, alla
quale l'unità in page scan dovrebbe iniziare lo scan. L'indice
k dipende da tutti gli ingressi descritti nella tabella
3.14.
Quando la differenza tra il clock del master e quello dello slave
è compresa tra −8·1.28
s=10.24
s e +7·1.28
s=8.96
s,
allora una delle frequenze definite in (
3.4) sarà
sicuramente la frequenza su cui lo slave in page scan sta ascoltando.
Comunque, visto che il master non può sapere in quale momento
lo slave entrerà nella fase di page scan, esso sarà costretto
a ripetere la trasmissione dei messaggi di page sulle frequenze del
treno A per
Npage volte o fino a quando non viene ricevuta una
risposta. Come abbiamo visto dalla tabella
3.13,
Npage
dipenderà dalla modalità di scan posseduta dallo slave che
il master intende raggiungere. Quando invece la differenza tra il
clock del master e quello dello slave è minore di −8·1.28
s
oppure maggiore di +7·1.28
s, allora è necessario utilizzare
le frequenze del treno B.
|
{ f(k−16),f(k−15),...,f(k−9),f(k−8),...,f(k−15)} |
| (3.5) |
Anche il treno B viene ripetuto
Npage volte. Se non viene rilevata
una risposta, si ritorna ad utilizzare le frequenze del treno A per
Npage volte e così via. L'uso in alternanza delle frequenze
dei 2 treni continua finché non si riceve una risposta oppure non
scade il time-out
pageTO. Se invece viene ricevuta una risposta,
il master passa nella fase master response.
Il sottostato page può essere raggiunto sia dallo stato standby
che dallo stato connection. Nel primo caso, non vi sono connessioni
attive cosicché l'unità può sfruttare tutta la capacità del canale
per effettuare il page. Nel caso in cui l'unità si trovasse nello
stato connection e volesse effettuare una procedura di page, può ottenere
una capacità maggiore utilizzando delle modalità speciali in cui possono
essere posti i link ACL. Nel caso siano presenti dei link SCO, questi
ultimi hanno priorità sulle procedure di page. Saranno comunque utilizzati
i pacchetti SCO con la minore occupazione di banda (HV3). Sarà
inoltre necessario modificare opportunamente il valore Npage.
Le specifiche Bluetooth consigliano i seguenti valori per Npage:
| SR mode | Nessun link SCO | 1 link SCO(HV3) | 2 link SCO(HV3) |
| R0 | Npage ≥ 1 | Npage ≥ 2 | Npage ≥ 3 |
| R0 | Npage ≥ 128 | Npage ≥ 256 | Npage ≥ 384 |
| R0 | Npage ≥ 256 | Npage ≥ 512 | Npage ≥ 768 |
Table 3.15: Page - Relazione tra Tpagescan, Npage e le modalità
di page R0,R1 e R2 in presenza di link SCO
Procedura di Page response
Quando uno slave in stato di page scan riceve un messaggio di page
da un master, inizia una procedura per la sincronizzazione tra il
master e lo slave. Entrambe le suddette unità Bluetooth compiono
una procedura di risposta (master response e slave response) per scambiarsi
informazioni utili per continuare nella realizzazione della connessione
vera e propria. La figura
3.22 riassume i passi compiuti
dalle due unità coinvolte nel page response e che verranno esaminati
in dettaglio nei paragrafi seguenti.
Figure 3.22: Cronologia eventi e pacchetti della procedura di page
Nella figura
3.23 invece troviamo la temporizzazione
dei messaggi usati per compiere i passi appena visti.
Figure 3.23: La procedura di page nel dominio del tempo
Dopo aver ricevuto il messaggio di page (pacchetto ID con il proprio
DAC), lo slave risponde con un pacchetto ID identico. Questa risposta
avviene 625μ
s dopo la ricezione del messaggio del master, usando
una frequenza appartenente alla page response sequence e collegata
direttamente alla frequenza alla quale era stato trasmesso dal master
il messaggio di page. Come si vede dalla figura
3.22,
dopo aver mandato il messaggio di risposta, lo slave attiva il proprio
ricevitore e aspetta l'arrivo del pacchetto FHS che conterrà
i parametri caratteristici del master (BD_ADDR da cui ricavare la
channel hopping sequence, il CLKN del master ecc.). Se quest'ultimo
pacchetto viene inviato e ricevuto con successo dallo slave, lo slave
stesso invia come risposta un pacchetto ID contente il proprio DAC,
per confermare al master l'avvenuta ricezione del pacchetto FHS; tale
risposta avviene sempre usando la page response hopping sequence.
Dopo l'invio della suddetta risposta il transceiver dello slave si
sincronizza sulla channel hopping sequence e quindi finalmente lo
slave si porta nello stato connection. La modalità connection
viene 'inaugurata' da un pacchetto POLL inviato dal master, cui lo
slave può rispondere con un pacchetto qualsiasi (tipicamente
si usa un pacchetto NULL). Questo è ciò che succede se la
procedura di setup della connessione va a buon fine. Se il pacchetto
POLL non viene ricevuto dallo slave oppure se il master non riceve
il pacchetto di risposta al proprio POLL, dopo un numero di slot pari
a
newconnectionTO dopo la conferma dell'avvenuta ricezione
del pacchetto FHS, il master e lo slave torneranno nei sottostati
page e page scan rispettivamente. Può accadere anche che lo slave
non riceva il pacchetto FHS del master; in questo caso esso continua
ad ascoltare il canale secondo le frequenze della page response hopping
sequence fino a che non riceve appunto il pacchetto FHS oppure non
scade il timeout
pagerespTO. In quest'ultimo caso viene concessa
un'unlteriore possibilità per realizzare la connessione poichè
lo slave ritorna nel sottostato page scan per un tempo pari a
Twpagescan.
Se non viene ricevuto alcun messaggio di page durante quest'ulteriore
periodo di page scan, lo slave ritorna nello stato in cui si trovava
prima di entrare nella prima fase di page scan e riprenderà la
sua politica periodica di page scan.
Per ciò che riguarda la generazione della sequenza di hopping,
osserviamo la seguente tabella:
| X | Y1 | Y2 | A | B | C | D | E | F |
| Xprs4−0(79) | CLKN1 | 32×CLKN1 | A27−23 | A22−19 | A8,6,2,4,2,0 | A18−10 | A13,11,9,7,5,3,1 | 0 |
Table 3.16: Ingressi al selection kernel per la fase di page response (slave)
L'ingresso X è così definito:
|
Xprs(79)=[CLKN16−12*+N]mod32 |
| (3.6) |
Per evitare di perdere l'aggancio appena effettuato con il master
a causa delle differenze tra il CLKN dello slave e il valore CLKE
stimato dal master, il valore dei bit
CLKN16−12 dev'essere registrato
nel momento in cui viene ricevuto il messaggio di page e poi mantenuto
solamente per quel che riguarda la generazione degli ingressi al selection
kernel. L'asterisco in
3.6 indica proprio che i 4 bit
CLKN16−12
vengono registrati e mantenuti. L'espressione
3.6 rappresenta
il valore che l'ingresso X assume nello slot (
N+1)-esimo dopo la
ricezione del messaggio di page. Il contatore N viene posto a 0 quando
lo slave risponde per confermare l'avvenuta ricezione del messaggio
di page. Dopodiché il valore di N viene incrementato di uno ogni volta
che
CLKN1diventa 0 (ovvero ogni volta che inizia uno slot TX
del master). L'ingresso X viene costruito secondo
3.6 fino
a che non viene inviato con successo il pacchetto FHS e la relativa
risposta da parte dello slave. Dopodiché lo slave entra nello stato
connection, nel quale si usa una diversa tabella degli ingressi al
selection kernel.
Quando il master riceve una risposta al proprio messaggio di page,
entra nel sottostato master response. Per cominciare, invia un pacchetto
FHS, contenente tra l'altro il proprio BD_ADDR e il proprio CLKN.
Dopo la trasmissione del suddetto pacchetto FHS, il master aspetta
una seconda risposta da parte dello slave, a conferma dell'avvenuta
ricezione del pacchetto FHS. Ancora una volta la suddetta risposta
consiste in un pacchetto ID con il DAC dello slave indirizzato. Se
questa risposta non arriva, il master ritrasmette il pacchetto FHS,
con il clock CLKN aggiornato al valore attuale; la ritrasmissione
continua usando sempre la page hopping sequence finché non arriva
una risposta oppure non scade il timeout
pagerespTO. In quest'ultimo
caso, il master ritorna nel sottostato page scan e segnala l'errore
al LM. Se invece viene ricevuta la risposta dello slave all'invio
del pacchetto FHS, il transceiver del master si porta sulla channel
hopping sequence e invia allo slave un pacchetto POLL. Anche questa
trasmissione richiede una conferma da parte dello slave, risposta
che deve arrivare nella forma di un pacchetto qualsiasi (tipicamente
un pacchetto NULL) entro un numero di slot pari a
newconnectionTO
altrimenti il master tornerà nel sottostato page e lo slave nel
sottostato page scan.
Per ciò che riguarda la generazione della sequenza di hopping,
osserviamo la seguente tabella:
| X | Y1 | Y2 | A | B | C | D | E | F |
| Xprm4−0(79) | CLKE1 | 32×CLKE1 | A27−23 | A22−19 | A8,6,2,4,2,0 | A18−10 | A13,11,9,7,5,3,1 | 0 |
Table 3.17: Ingressi al selection kernel per la fase di page response (master)
L'ingresso X è così definito:
|
Xprm(79)=[CLKE16−12*+koffset*+(CLKE4−2,0*−CLKE16−12*)mod1+6N]mod32 |
| (3.7) |
Come abbiamo visto in
3.4.10, anche in questo
caso il valore del CLKE viene registrato al momento della ricezione
del pacchetto ID dello slave in risposta al messaggio di page, e poi
viene mantenuto. Anche il valore di
koffset viene registrato
e mantenuto. Il master calcolerà il valore dell'ingresso X allo
stesso modo dello slave, ovvero incrementando il contatore di uno
ogni volta che il valore
CLKE1 viene posto a 0 (inizio di uno
slot TX del master). Il primo incremento dev'essere fatto prima di
mandare il pacchetto FHS.
In questo stato la connessione tra master e slave è stata stabilita
e le due unità possono scambiarsi pacchetti. Entrambe le unità
usano ora il CAC (channel access code), la channel hopping sequence
e il CLKN del master (ora denominato CLK ad indicare che è comune
alle unità della piconet). Il master inizia le proprie trasmissioni
negli slot pari (
CLK1−0=00), lo slave inizia le proprie trasmissioni
negli slot dispari (
CLK1−0=10). Osserviamo di seguito la tabella
degli ingressi al selection kernel:
| X | Y1 | Y2 | A | B | C |
| CLK6−2 | CLK1 | 32xCLK1 | A27−23⊕CLK25−21 | A22−19 | A8,6,2,4,2,0⊕CLK20−16 |
| D | E | F | | | |
| A18−10⊕CLK15−7 | A13,11,9,7,5,3,1 | (16×CLK27−7)mod79 | | | |
Table 3.18: Ingressi al selection kernel per lo stato connection
I primi pacchetti scambiati all'inizio dello stato connection sono
messaggi di controllo che contengono informazioni essenziali che caratterizzano
il collegamento appena realizzato e informazioni aggiuntive sulle
unità Bluetooth coinvolte (ad esempio vengono definiti eventuali
link SCO e altri parametri). Dopo questo scambio di informazioni utili,
il trasferimento vero e proprio dei dati può finalmente cominciare.
Lo stato connection può essere abbandonato tramite i comandi
detach e reset. La connessione tra due unità Bluetooth
può essere terminata in qualsiasi momento da entrambe le parti.
Il comando detach serve proprio a questo scopo; i parametri di configurazione
della connessione che viene terminata vengono comunque mantenuti.
Il comando reset invece è un hard reset di tutti i processi
dell'host controller e del link manager. Dopo un comando reset, tutto
il controller va riconfigurato.
Durante l'operazione in stato connection, un'unità Bluetooth
può assumere diverse modalità operative: hold mode,
sniff mode, active mode, park mode. Esaminiamo ora in dettaglio queste
modalità.
In active mode, l'unità Bluetooth partecipa attivamente alla
piconet. Il master programma le trasmissioni in base alle richieste
di traffico da e verso gli slave. In più esso realizza delle
trasmissioni su base periodica per consentire agli slave di rimanere
sincronizzati
49. Gli slave in active mode ascoltano il canale negli slot "master-to-slave"
(i già citati TX slot del master). Usando il campo "type"
(vedi pagina
pageref), gli slave indirizzati possono
conoscere quanti slot sono stati riservati dal master per la trasmissione
del messaggio e rimanere attivi di conseguenza. Gli slave non indirizzati
possono a loro volta entrare in "sleep" ovvero
deferire l'ascolto del canale per tutta la durata del messaggio.
Durante lo stato connection, un link ACL verso uno slave può
essere messo in modalità hold
50. Questo vuol dire che quello slave, temporaneamente, non supporterà
l'invio e la ricezione di pacchetti ACL, mentre potrà comunque
supportare eventuali link SCO. Questa modalità è utile per
risolvere i problemi di capacità in termini di banda disponibile
sul canale, già citati in relazione alle fasi di inquiry e page.
Quindi un'unità Bluetooth può usare la modalità hold
per fermare temporaneamente il trasferimento dei dati su un link ACL
in modo da riservare capacità per inquiry, page, scan o passare
ad operare in altra piconet. L'unità in modalità hold può
anche entrare in uno stato a basso consumo di potenza (
low power)
e inoltre essa manterrà il proprio AM_ADDR. Le specifiche Bluetooth
definiscono 3 modi per utilizzare la modalità hold; questi 3
modi vengono gestiti da 2 comandi LMP (
link manager protocol):
| Comando | Parametri |
| LMP_hold | hold time, hold instant |
| LMP_hold_req | hold time, hold instant |
Table 3.19: Bluetooth: comandi usati per la modalità hold
Il parametro hold time specifica quanto tempo dovrà durare
l'hold per quel link ACL, mentre il parametro hold instant
specifica quando dovrà iniziare l'hold per quel link ACL.
Figure 3.24: Scambio di messaggi LMP per la richiesta della modalità Hold
Con questa modalità si può ridurre il ciclo di operatività
di uno slave relativamente alla sua attività di ascolto del canale.
In condizioni standard, se uno slave possiede un link ACL attivo,
deve mettersi in ascolto sul canale in tutti gli slot TX del master
per ricevere eventuali pacchetti. Con la modalità sniff, possiamo
ridurre il numero di slot che il master può utilizzare per trasmettere
pacchetti ad uno slave specifico (quello in modalità sniff).
In pratica il master è costretto a iniziare la trasmissione dei
messaggi verso lo slave in modalità sniff solo in alcuni slot
dedicati, detti
sniff slots. Questi slot si ripetono periodicamente
ad intervalli di
Tsniff. Osserviamo la seguente figura:
Figure 3.25: Sniff slots nel dominio del tempo
Il master e lo slave si metteranno d'accordo sia sull'"offset"
(vedi figura), ovvero l'inizio del primo sniff slot, che sul
Tsniff.
Il parametro
Nsniff attempt indica la finestra temporale (espressa
in numero di slot) durante la quale lo slave in modalità sniff
sarà in ascolto per eventuali trasmissioni da parte del master.
Anche quest'ultimo parametro andrà negoziato tra master e slave
51.
Lo slave in modalità sniff , una volta iniziata la finestra di
sniff, ascolterà il canale per un numero di slot RX (TX del master)
pari a
Nsniff attempt. Se durante questi slot esso non viene
indirizzato (ovvero non decodifica alcun pacchetto con il proprio
AM_ADDR), smette di ascoltare il canale. Se al contrario, viene ricevuto
un pacchetto con il proprio AM_ADDR, alla fine degli slot previsti
dal parametro
Nsniff attempt, lo slave rimarrà in ascolto
per un numero di slot pari a
Nsniff timeout, in attesa di
altri dati ad esso indirizzati. Possiamo osservare che, data la non
completa affidabilità del collegamento radio Bluetooth, la finestra
definita in base a
Nsniff attempt dovrebbe avere dimensioni
tali da permettere al master di ritentare le trasmissioni verso uno
slave in modalità sniff. Inoltre possiamo osservare il caso estremo
in cui il valore
Nsniff timeout è tale da riempire l'intero
Tsniff, ovvero, una volta che uno slave ha ricevuto un pacchetto
durante gli sniff slot (
Nsniff attempt), continuerà ad
ascoltare per l'intera durata dello sniff interval
52.
La gestione della modalità sniff avviene tramite i comandi LMP riassunti
nella seguente tabella:
| Comando | Parametri |
| LMP_sniff_req | timing control flags,Dsniff,Tsniff, |
| LMP_unsniff_req | sniff attempt,sniff timeout |
Table 3.20: Bluetooth: comandi usati per la modalità sniff
Inoltre, anche in questo caso vi possono essere diverse possibilità
per entrare ed uscire dalla modalità sniff.
La modalità park è utile quando uno slave non vuole partecipare attivamente
alla piconet, ma vuole comunque rimanere sincronizzato al canale.
La modalità park prevede una attività molto bassa e quindi riduce
notevolmente il consumo di potenza. Quando uno slave decide di portarsi
in modalità park, rinuncia al proprio AM_ADDR e ottiene altri 2 indirizzi,
entrambi di 8 bit:
- PM_ADDR: parked member address
- AR_ADDR: access request address
Il PM_ADDR distingue uno slave "parked"
53 da un altro. Quest'indirizzo viene usato durante la procedura di
"unparking" (uscita dalla modalità park) iniziata
dal master. Vi è la possibilità che un'unità in modalità park abbia
l'indirizzo PM_ADDR uguale a 0 (tutti i bit 0): quest'indirizzo è
riservato e l'uscita dalla modalità park viene in quel caso effetuata
usando il BD_ADDR del dispositivo Bluetooth. L'indirizzo AR_ADDR
viene invece usato durante la procedura di unparking iniziata dallo
slave. Poichè gli slave in modalità park non posseggono un AM_ADDR,
tutto i pacchetti diretti verso di essi saranno dei pacchetti broadcast
(vedi pagina
pageref).
Ad intervalli regolari, uno slave in modalità park si attiva per risincronizzarsi
e ascoltare il canale per ricevere eventuali pacchetti broadcast.
Questo processo viene supportato dal master che fornisce il cosiddetto
beacon channel54 che verrà descritto nel prossimo paragrafo. La struttura dei beacon
verrà comunicata allo slave all'inizio della fase di park e, se dovesse
cambiare, il master si occuperà di comunicare i cambiamenti mediante
opportuni pacchetti broadcast inviati agli slave in modalità park.
Come abbiamo già visto
55, la modalità park può essere usata per connettere più di 7 slave
ad un master.
Struttura generale del beacon channel
Quando uno o più slave passano in modalità park, il master
costruisce un cosiddetto "beacon channel" per
supportare i suddetti slave.
Figure 3.26: Struttura generale del Beacon Channel
Come si può vedere dalla figura
3.26, il
beacon channel è costituito da un
beacon slot o da un
treno di beacon slot equidistanti, ripetuti con un periodo costante.
Il valore
TB rappresenta il
beacon interval ovvero il
periodo con cui si ripetono i beacon slot. Questi ultimi sono in numero
NB (
NB ≥ 1) e sono spaziati di ∆
B. L'inizio
del primo beacon slot del treno è chiamato
beacon instant
e serve da riferimento per la temporizzazione del beacon channel.
TB e
NB andranno scelti opportunamente in modo da permettere
ad uno slave in modalità park di sincronizzarsi anche in un ambiente
con interferenze. I comandi LMP usati per gestire tale modalità
sono riassunti nella seguente tabella:
| Comando | Parametri |
| LMP_park_req | timing control flags |
| DB |
| TB |
| NB |
| ∆B |
| NBsleep |
| DBsleep |
| Daccess |
| Taccess |
| Nacc−slots |
| Npoll |
| Maccess |
| access scheme |
| PM_ADDR |
| AR_ADDR |
| LMP_set_broadcast_scan_window | timing control flags |
| DB(opzionale) |
| broadcast scan window |
| LMP_modify_beacon | timing control flags |
| DB(opzionale) |
| TB |
| NB |
| ∆B |
| Daccess |
| Taccess |
| Nacc−slots |
| Npoll |
| Maccess |
| access scheme |
| LMP_unpark_PM_ADDR_req | timing control flags |
| DB(opzionale) |
| AM_ADDR |
| PM_ADDR |
| (altre paia di AM_ADDR e PM_ADDR, fino a 7) |
| LMP_unpark_BD_ADDR_req | timing control flags |
| DB(opzionale) |
| AM_ADDR |
| BD_ADDR |
| AM_ADDR (opzionale) |
| BD_ADDR (opzionale) |
Table 3.21: Bluetooth: comandi usati per la modalità park
Il beacon channel serve essenzialmente per:
- trasmissione di pacchetti speciali che gli slave in modalità
park possono usare per risincronizzarsi.
- trasmissione di messaggi verso gli slave in modalità park per
comunicare eventuali cambiamenti nella struttura del beacon channel.
- invio di pacchetti broadcast generali verso gli slave in modalità
park.
- realizzare procedure di unparking di uno o più slave in modalità
park.
E' importante notare che anche nel caso del beacon channel, eventuali
link SCO hanno la precedenza, per cui la trasmissione dei beacon potrebbe
essere interrotta.
Beacon access windows
Vengono definite, sempre nel contesto del beacon channel, delle
access
window, nelle quali gli slave in modalità park possono richiedere
di uscire dalla stessa modalità. Per aumentare l'affidabilità
di questa procedura, le access window possono essere ripetute
Maccess
volte (
Maccess ≥ 1).
Figure 3.27: Definizione delle Access Windows
Come si vede dalla figura
3.27, la serie delle
access window inizia
Daccess dopo il beacon instant e la durata
delle singole access window è indicata con
Taccess. All'interno
di queste access window, l'accesso agli slave avviene con una tecnica
di
polling:
Figure 3.28: Procedura di accesso in modalità park
Come si vede dalla figura
3.28, viene usato uno schema
TDM simile a quello usato nel canale della piconet, ovvero trasmissioni
master-to-slave si alternano a trasmissioni
slave-to-master.
Gli slot slave-to-master sono divisi in 2 mezzi slot da 312.5μ
s
ciascuno. In base all'indirizzo AR_ADDR, ogni slave ha il suo spazio
per inviare una richiesta di unparking, però può farlo solo
se nel precedente slot master-to-slave ha ricevuto un pacchetto broadcast.
In questo senso il master effettua un
polling (interrogazione)
degli slave. Possiamo osservare la figura seguente:
Figure 3.29: Access windows e link SCO
Un eventuale link SCO può sovrapporsi alla ripetizione delle
access windows e come si vede dalla figura, la presenza di un pacchetto
SCO nello slot master-to-slave numero 2 (ovvero il terzo slot da sinistra),
per prima cosa impone che anche lo slot successivo sia occupato da
un pacchetto SCO (stavolta slave-to-master), e, in più, fa si
che le eventuali richiesta di unparking degli slave con AR_ADDR pari
a 3 e 4 non possano venire ascoltate (questo poiché come abbiamo detto,
le richieste possono avvenire solo se nel precedente slot master-to-slave
era stato inviato un pacchetto broadcast).
Inoltre uno slave in modalità park può decidere di non ascoltare
tutti i beacon train forniti dal master. Come si può vedere dalla
tabella
3.21, nel messaggio LMP_park_req sono inclusi
i parametri
NBsleep e
DBsleep che indicano rispettivamente
quanti beacon train lo slave salterà e a partire da quale istante.
Possiamo comunque notare che, essendo il valore
TBsleep espresso
su 2 byte, il massimo intervallo tra due consecutivi beacon train
è circa 41s
56; inoltre
NBsleep è espresso su un byte e quindi uno slave
può saltare fino a 255 beacon train consecutivi. Nel caso peggiore
quindi uno slave potrebbe rimanere in modalità park senza ascoltare
alcun beacon train per circa 2,9 ore e questo, considerando che in
modalità park lo slave di solito è in low-power e quindi
il suo CLKN subisce un drift rispetto al CLKN del master, potrebbe
causare la totale perdita del sincronismo tra lo slave e il master.
L'unico rimedio a questa situazione è una serie di unparking
e parking occasionali dello slave.
3.4.17 Struttura e gestione di una Scatternet
Una scatternet Bluetooth è un gruppo di piconet interconnesse
tra loro. Un master o uno slave in una piconet A può diventare
uno slave in un'altra piconet B quando viene ad essere il destinatario
di un page da parte del master della piconet B. Dall'altro lato, un'unità
Bluetooth attiva in una piconet A può effettuare un page verso
il master o uno slave di una piconet B: in questo caso poichè
l'unità che effettua il page è sempre master, sarà
richiesto uno "scambio di ruoli" (
master-slave
switch).
Affinché un'unità possa partecipare a più di una piconet,
essa dovrà operare in time multiplexing. Nel caso in cui
un'unità Bluetooth possegga soltanto dei link ACL, essa potrà
richiedere di entrare in hold o park nella piconet corrente, dopodiché
per tutta la durata dell'hold o park potrà essere attiva in un'altra
piconet cambiando i parametri del canale. Anche la modalità sniff
può risultare utile in quanto, negli intervalli di tempo tra
gli sniff slot, si può passare ad operare in un'altra piconet.
Se sono presenti link SCO, l'operatività in un altra piconet
è possibile solo durante gli slot compresi tra quelli riservati
a link SCO; ciò è possibile solo se il link SCO è realizzato
tramite pacchetti HV3 (quelli con occupazione di banda minore) e anche
in quest'eventualità, sono solo 2 gli slot disponibili per visitare
un'altra piconet.
3.4.18 Scambio dei ruoli master-slave
Bluetooth consente ad una qualsiasi unità di richiedere uno scambio
di ruoli rispetto ad un altra unità con la quale si sta comunicando.
Il processo di scambio dei ruoli consiste in una serie di scambi di
messaggi tra master e slave che possiamo osservare nella figura seguente:
Figure 3.30: Scambio di ruoli master/slave
3.5 Livelli superiori dello stack Bluetooth
Riguardando la figura
3.1, possiamo dire che i livelli
Radio e Baseband rappresentano il livello fisico (PHY) nella reppresentazione
a 7 livelli OSI/ISO.
- Il livello Link Manager si occupa della configurazione dei link ACL
e SCO (inizializzazione, mantenimento, conclusione), autenticazione,
sicurezza, QoS, controllo del consumo di potenza, scheduling delle
trasmissioni. In assenza di un sistema HOST (HCI), fornisce il protocollo
LMP, basato su una serie di comandi, che consente di controllare
il livello baseband e quindi il MAC.
- HCI: Host Controlled Interface, fornisce un'interfaccia a comandi
per i livelli Link Manager e Baseband. Rende inoltre accessibili i
registri di stato e controllo. Tale interfaccia è stata prevista per
fornire un metodo d'accesso comune alle capacità del livello Baseband,
rendendo così più facile l'uso di hardware realizzato da costruttori
diversi.
- Il livello L2CAP (Logical Link Control and Adaptation Layer)
fornisce servizi connection oriented e connectionless
ai livelli superiori. I suoi compiti includono multiplexing dei protocolli57, segmentazione e riassemblaggio delle PDU (protocol data unit)
provenienti dai livelli superiori e aventi dimensioni maggiori di
64KB, supporto QoS (quality of service). In particolare, per
quest'ultima funzionalità, il livello L2CAP consente, al momento dell'instaurazione
della connessione tra due dispositivi Bluetooth, lo scambio di informazioni
riguardanti il livello QoS della connessione stessa. Inoltre L2CAP
si occupa di fare rispettare quanto negoziato riguardo il QoS.
- RFCOMM è un protocollo usato per emulare le porte seriali RS232,
utile perchè molte applicazioni già esistenti sono basate
su una comunicazione seriale. Possono esistere fino a 60 connessioni
contemporanee tra due dispositivi Bluetooth. RFCOMM è basato
su un sottoinsieme di TS07.1058 e può anche emulare un null-modem. Il Service Discovery
Protocol (SDP) permette ai dispositivi mobili di scoprire quali servizi
sono disponibili nelle loro vicinanze e le caratteristiche di tali
servizi. Il protocollo SDP permette al client di cercare servizi
con caratteristiche specifiche (rappresentate da un numero detto UUID),
oppure di navigare tra i servizi offerti dal server. Il protocollo
SDP fornisce dei mezzi per scoprire i servizi ma non per accedere
a tali servizi.
- È possibile realizzare TCP/IP direttamente su L2CAP, ma attualmente,
non sono ancora stati definiti dei profili per questa possibilità.
La maggior parte delle implementazioni del TCP/IP sono basate su PPP
realizzato su RFCOMM. La grande popolarità del protocollo TCP/IP sta
comunque spingendo la ricerca per migliorarne le prestazioni sui link
Bluetooth.
Una nota di riguardo va sicuramente fatta in merito alla sicurezza
dei dati trasmessi tramite un link Bluetooth. Bluetooth fornisce delle
misure di sicurezza sia a livello di applicazione (
application
layer) che a livello di collegamento (
link layer). Per quel
che riguarda quest'ultimo livello vengono usate 4 diverse "entità"
per gestire la sicurezza:
| Entità | Dimensione |
| BD_ADDR | 48 bits |
| Private user key, authentication | 128 bits |
| Private user key, encryption configurable level | 8-128 bits |
| RAND | 128 bits |
Table 3.22: Bluetooth: gestione della sicurezza
Quindi abbiamo un indirizzo pubblico (BD_ADDR), 2 chiavi segrete
e un numero casuale (RAND) che è diverso per ogni transazione.
Le chiavi segrete vengono derivate durante l'inizializzazione e non
vengono più rivelate. Normalmente la chiave di cifratura (encryption
key) viene derivata dalla chiave di autenticazione (authentication
key) durante il processo di autenticazione. Per il suddetto processo
la dimensione della chiave usata è sempre 128 bit. Invece per
il processo di cifratura (encryption), la dimensione della
chiave varia tra 1 e 18 ottetti. La dimensione della chiave di cifratura
è configurabile per 2 motivi:
- la prima giustificazione riguarda le diverse richieste imposte agli
algoritmi di crittografia in diversi paesi, sia relativamente alla
possibilità di esportare i prodotti, sia relativamente allo stato
della riservatezza elettronica in generale.
- la flessibilità della dimensione della chiave di cifratura fornisce
un valido aiuto per un futuro miglioramento della sicurezza senza
bisogno di riprogettare tutto il sistema crittografico.
La chiave di cifratura è diversa dalla chiave di autenticazione.
Ogni volta che viene attivata la crittografia, viene generata una
chiave di cifratura e il tempo di vita di tale chiave non necessariamente
corrisponde al tempo di vita della chiave di autenticazione. La natura
della chiave di autenticazione è più statica di quella della
chiave di cifratura: una volta stabilita, sarà la particolare
applicazione in esecuzione sul dispositivo Bluetooth a decidere se
e quando cambiarla. La chiave di autenticazione viene chiamata
link
key.
RAND è un numero casuale, che può essere derivato da un
processo casuale o pseudocasuale nell'unità Bluetooth. Non è
un parametro statico e cambia frequentemente.
Lo scopo dello standard IEEE 802.11 è quello di "fornire
connettività wireless a dispositivi o stazioni che richiedono un'istallazione
rapida, siano essi portatili o palmari o ancora montati su veicoli
mobili all'interno di una "local area" [
2].
Il suddetto standard definisce le funzioni e i servizi richiesti ai
dispositivi compatibili con esso per operare all'interno delle reti
ad hoc e con infrastruttura, anch'esse compatibili con lo standard.
Esso definisce delle procedure MAC e tecniche di trasmissione dei
segnali attraverso un livello fisico (PHY) che potrà essere la radio
frequenza (RF) o la radiazione infrarossa (IR). La comunicazione è
"orientata al pacchetto
59". Vengono descritte anche delle procedure per fornire
un certo livello di riservatezza delle informazioni.
Una caratteristica molto importante del protocollo definito dallo
standard IEEE 802.11 è che un dispositivo mobile può comunicare con
altri dispositivi, fissi o mobili, in maniera trasparente, ovvero,
al di sopra del livello MAC, un dispositivo IEEE 802.11 viene visto
come un qualsiasi dispositivo appartenente ad una LAN IEEE 802.x
60 e offre dei servizi comparabili con quelli offerti da un dispositivo
802.x appunto. In altre parole la mobilità dei dispositivi viene gestita
a livello MAC.
4.1 Gli standard IEEE 802.11
Nel 1997 l'istituto IEEE (
Institute for Electric and Electronic
Engineering), approvò uno standard per wireless LAN denominato "802.11",
che specificava la realizzazione di dispositivi capaci di ottenere
1 o 2 Mbps in termini di velocità di trasferimento[
1]. Lo
standard specifica il livello MAC e il livello PHY per la trasmissione
nella banda ISM 2.4 GHz. La banda utilizzata si estende da 2.4 GHz
fino a 2.4835 GHz in Nord America e Europa, mentre in Giappone le
normative vigenti impongono una banda da 2.471 GHz a 2.497GHz. Due
anni più tardi, in seguito agli ottimi risultati ottenuti da produttori
quali
Lucent Technologies e
Harris Semiconductor
(ora
Intersil Corp.), l'istituto IEEE ratificò un nuovo standard,
con prestazioni migliori, denominato IEEE 802.11b; esso permetteva
di ottenere 11 Mbps in termini di velocità di trasferimento ed è lo
standard su cui sono basati la maggior parte dei dispositivi attualmente
disponibili sul mercato. In realtà IEEE 802.11b non è uno standard
"ex novo", bensì specifica delle modifiche alle
tecniche di modulazione ( e quindi al livello PHY) che permettono
di elevare la velocità di trasferimento e mantengono comunque la compatibilità
all'indietro verso i dispositivi IEEE 802.11.
Il nome IEEE 802.11(b) risulta un pò troppo ostico per il mercato
dell'utente finale e quindi sempre più spesso sui dispositivi attualmente
sul mercato si trova la sigla Wi-Fi, contrazione di Wireless
Fidelity; Wi-Fi è un marchio di qualità poichè attesta la certificazione
del dispositivo da parte della Wi-Fi Alliance.
Sempre nel 1999 l'istituto IEEE ratificò le specifiche di un altro
standard della famiglia 802.11, la variante denominata 802.11a. Le
specifiche riguardano sempre il livello MAC e il livello PHY, ma la
banda utilizzata è la U-NII (Unlicensed National Information
Infrastructure) 5 GHz e, mediante la tecnica di modulazione OFDM
(orthogonal frequency division multiplexing), i dispositivi
realizzati in conformità allo standard IEEE 802.11a possono ottenere
fino a 54 Mbps in termini di velocità di trsferimento. Anche in questo
caso si usa sempre più spesso la denominazione Wi-Fi5 per indicare
i dispositivi compatibili con lo standard IEEE 802.11a.
Attualmente lo stato delle specifiche 802.11 può essere riassunto
così:
| Standard | Descrizione | Approvato |
| IEEE 802.11 | Standard per WLAN,fino a 2Mbps, ISM 2.4GHz | 1997 |
| IEEE 802.11a | Standard per WLAN,fino a 54Mbps, U-NII 5 GHz | 1999 |
| IEEE 802.11b | Standard per WLAN,fino a 11Mbps, ISM 5 GHz | 1999 |
Table 4.1: IEEE 802.11: standard approvati
Note:
- La banda U-NII non necessita di licenze ma è disponibile solo in Nord
America. Sono molteplici gli sforzi per ottenere l'uso senza licenza
di tale banda anche in Europa ma attualmente i dispositivi compatibili
IEEE 802.11a non possono funzionare in Europa.
- Grazie a una tecnica di codifica specificata ma descritta come opzionale
nelle specifiche IEEE 802.11b, ovvero la PBCC (packet binary
convolutional code), è stato possibile realizzare dei dispositivi
compatibili 802.11b che raggiungono i 22 Mbps in termini di velocità
di trasferimento. Tali dispositivi realizzano questa velocità solo
comunicando con altri dispositivi che utilizzano la stessa tecnica
di codifica e risultano compatibili con i dispositivi 802.11(b).
La seguente tabella riassume invece gli standard in via di approvazione
(
draft):
| Standard | Descrizione | Stato attuale |
| IEEE 802.11g | estensione di 802.11b, ISM 2.4 GHz, fino a 54 Mbps | Ratificazione attesa per fine 2002, inizio 2003 |
| IEEE 802.15.1 | standard per WPAN, compatibile Bluetooth, ISM 2.4 GHz | Approvato sotto condizione marzo 2002 |
Table 4.2: IEEE 802.11: standard in via di approvazione
E' interessante soprattutto lo standard IEEE 802.11g, che promette
di raggiungere le stesse prestazioni della versione 802.11a in termini
di velocità di trasferimento, pur operando nella banda ISM 2.4 GHz
(e quindi disponibile anche in Europa), e mantenendo la compatibilità
con i dispositivi 802.11b senza bisogno di hardware aggiuntivo. Infatti
sono attualmente disponibili sul mercato dei dispositivi "ibridi"
802.11a e 802.11b ma ovviamente, a causa della diversità sia della
banda utilizzata che della tecnica di modulazione, tali dispositivi
necessitano di hardware separato per supportare i due standard.
Infine osserviamo l'ultima tabella che riassume gli standard ancora
a livello di sviluppo, ovvero a livello di
task group (TG):
| Standard | Scopo del progetto |
| IEEE 802.11e | Migliorare il MAC 802.11 nella gestione del Quality
of Service, delle classi di servizi, della sicurezza e dell'autenticazione.
Queste migliore dovrebbero permettere servizi quali telefonia e trasmissioni
video sui collegamenti wireless 802.11 |
| IEEE 802.11f | Sviluppo dell'IAPP (Inter access point protocol) che
realizza l'interoperabilità tra access point di diversi costruttori |
| IEEE 802.11h | Migliorare il MAC e il PHY di 802.11a per renderlo
compatibile con le norme europee |
| IEEE 802.11i | Migliorare il MAC 802.11 per aumentare la sicurezza
dei dati trasmessi |
Table 4.3: IEEE 802.11: standard in via di sviluppo
4.2 La normativa italiana
Come già accennato, la banda di 2,4GHz non è soggetta a licenze in
molti paesi del mondo tra cui l'Italia e può essere utilizzata da
chiunque nell'ambito però di severi limiti di emissione di potenza;
il limite di emissione in Italia per apparati a "bassa
potenza" è pari a 0,1
W/
mq per la potenza dell'onda piana
equivalente
61 (più diffusamente noto come limite di 100
mW), come stabilito dal
decreto ministeriale 381/98 all'articolo 4, comma 2.
La regolamentazione applicata alle attività di telecomunicazioni
è quella prevista nel decreto del Presidente della Repubblica num.
447 del 5 ottobre 2001
All'articolo 4 si specifica che:
1. Una licenza individuale è necessaria nel caso di installazione
di una o più stazioni radioelettriche o del relativo esercizio di
collegamenti di terra e via satellite richiedenti un'assegnazione
di frequenza, con particolare riferimento a sistemi:
a) fissi, mobili terrestri, mobili marittimi, mobili aeronautici;
[omissis]
All'articolo 5 si specifica che: 1.Un'autorizzazione generale è necessaria
nel caso di: [omissis]
b) installazione o esercizio di sistemi che impiegano bande di frequenze
di tipo collettivo: [omissis]
2) senza alcuna protezione, mediante dispositivi di debole potenza,
compresi quelli rispondenti alla raccomandazione CEPT/ERC/REC 70-03.
[omissis]
2.2) di installazione o esercizio di reti locali radiolan e hiperlan,
ad eccezione di quanto disposto dall'articolo 6, comma 1, lettera
b); [omissis]
All'articolo 6 si specifica che: 1. Sono di libero uso le apparecchiature
che impiegano frequenze di tipo collettivo, senza alcuna protezione,
per collegamenti a brevissima distanza con apparati a corto raggio,
compresi quelli rispondenti alla raccomandazione CEPT-ERC/REC 70-03,
tra le quali rientrano in particolare: [omissis]
b) reti locali di tipo radiolan e hiperlan nell'ambito del fondo,
ai sensi dell'articolo 183, comma secondo, del decreto del Presidente
della Repubblica n. 156 del 1973; sono disciplinate ai sensi dell'articolo
5 le reti hiperlan operanti obbligatoriamente in ambienti chiusi o
con vincoli specifici; per "fondo" in materia
di telecomunicazioni si richiama la legge del 1973 all'articolo 183
che recita: Nessuno può eseguire od esercitare impianti di telecomunicazioni
senza aver ottenuto la relativa concessione o, per gli impianti di
cui al comma secondo dell'art.1, la relativa autorizzazione. Tuttavia
è consentito al privato di stabilire, per suo uso esclusivo, impianti
di telecomunicazioni per collegamenti a filo nell'ambito del proprio
fondo o di più fondi di sua proprietà, purchè contigui, ovvero nell'ambito
dello stesso edificio per collegare una parte di proprietà del privato
con altra comune, purchè non connessi alle reti di telecomunicazione
destinate a pubblico servizio. Parti dello stesso fondo o più fondi
dello stesso proprietario si considerano contigui anche se separati,
purchè collegati da opere permanenti di uso esclusivo del proprietario,
che consentano il passaggio pedonale. [omissis]
Questo articolo vieta l'erogazione di servizi a terzi pur anche nell'ambito
del proprio fondo, ed in particolare vieta esplicitamente l'interconessione
della cella WLAN Wi-Fi ad una rete pubblica (Internet).
Riassumendo, il decreto del 5 ottobre 2001 prevede tre categorie di
utilizzo:
- Licenza individuale
- Autorizzazione Generale (in questo caso sono dovuti dei contributi
per ogni sede e per ogni variazione)
- Uso libero
Quindi :
- non vi è nessun canone da pagare per l'utilizzo/installazione di una
wireless LAN.
- qualora i dispositivi radio garantiscano una copertura limitata solo
all'area o edificio di proprietà, non è necessaria alcuna autorizzazione.
- nel caso in cui la copertura della rete wireless vada ad interessare
anche suolo pubblico, strade o altre proprietà, è necessario richiedere
un'autorizzazione al Ministero delle Poste e Telecomunicazioni.
E' comunque vietata espressamente l'interconnessione di sistemi radiolan
a reti pubbliche di telecomunicazioni quali Internet e la rete telefonica.
4.3 L'architettura di una WLAN IEEE 802.11
Una WLAN 802.11 è basata su una architettura cellulare, ovvero l'area
in cui deve essere distribuito il servizio viene suddivisa in celle
proprio come accade nei sistemi di distribuzione per servizi di telefonia
cellulare. Ciascuna cella viene chiamata BSS (
basic service
set). Una BSS è un'insieme di "stazioni" (STA)
ovvero dispositivi fissi o mobili compatibili IEEE 802.11. Le STA
vengono controllate tramite una
coordination function (CF)
e lo standard 802.11 ne prevede due:
- Distributed Coordination Function (DCF)
che è obbligatoria per ogni BSS;
- Point Coordination Function (PCF)
che invece è opzionale.
Una "coordination function" è in pratica un
insieme di regole per l'accesso al mezzo trasmissivo e la realizzazione
dei vari servizi offerti dal protocollo e quindi dalle diverse STA.
L'attributo "distributed" assegnato al DCF indica
l'assenza di un coordinamento centralizzato al funzionamento delle
STA di una BSS, ovvero l'accesso al mezzo trasmissivo e il trasferimento
dei dati è totalmente distribuito tra le STA di quella BSS. Al contrario,
quando in una BSS è attiva la funzione PCF (ricordiamo che la sua
implementazione è opzionale), allora esiste una particolare STA che
regola l'accesso al mezzo trasmissivo e la realizzazione dei servizi,
e le altre STA devono seguire le regole dettate dalla STA che controlla
la BSS.
La configurazione di rete più semplice realizzabile con dispositivi
802.11 è la cosiddetta IBSS (indipendent BSS), che è una rete
"ad hoc" formata da almeno 2 STA. Una BSS può
a sua volta essere parte integrante di una rete più ampia, la cosiddetta
extended service set (ESS). Una ESS è formata da una serie
di BSS interconnesse tra di loro tramite un distribution system
(DS). Tipicamente il DS potrebbe essere una rete cablata (ethernet
o altra). Dal punto di vista logico, la BSS e il DS utilizzano dei
mezzi trasmissivi diversi: la BSS utilizza il wireless medium
(WM) mentre il DS utilizza il distribution system medium (DSM).
L'architettura IEEE 802.11 è indipendente da un mezzo trasmissivo
specifico e quindi il WM e il DSM possono essere uguali ma possono
anche non esserlo. In ogni caso le specifiche IEEE 802.11 coprono
solo il WM. Le STA connesse al DS vengono dette access point
(AP). Lo standard IEEE 802.11 divide i servizi offerti dalle STA in
due categorie:
- Station services (SS)
- Distribution system services (DSS)
I servizi DSS vengono realizzati tramite gli access point e sono dei
servizi che permettono al MAC il trasporto dei pacchetti tra due STA
che non possono comunicare direttamente poichè non sono nell'area
di copertura radio l'una dell'altra. Lo standard definisce anche il
concetto di
portal. Un portal è un dispositivo che permette
l'interconnessione tra una rete LAN 802.11 e un'altra rete 802.x.
Questo concetto rappresenta una descrizione astratta di una parte
delle funzionalità di un
bridge. Anche se lo standard non lo
richiede espressamente, la maggior parte delle installazioni riuniscono
l'access point e il portal in un'unica entità fisica.
La seguente figura riassume tutti i componenti tipici di un'architettura
di rete 802.11:
Figure 4.1: L'architettura completa IEEE 802.11
4.4 Servizi offerti dalle reti IEEE 802.11
Abbiamo visto la divisione fatta dallo standard tra station services
e distribution system services. Ora analizziamo meglio i singoli servizi
e osserviamo innanzitutto la seguente tabella che li riassume mantenendo
la distinzione suddetta:
| Station Services | Distribution System Services |
| Authentication | Association |
| Deauthentication | Disassociation |
| Privacy | Distribution |
| MSDU delivery | Integration |
| Reassociation |
Table 4.4: IEEE 802.11: servizi disponibili
In tutto vi sono 9 servizi, di cui 6 sono collegati al trasporto dei
pacchetti tra le STA (MSDU (MAC service data unit) delivery)
e 3 vengono usati per controllare l'accesso e la riservatezza delle
WLAN 802.11. I servizi sono realizzati tramite uno o più tipi di MAC
frame: alcuni saranno realizzati utilizzando dei frame di tipo
management, altri da frame di tipo data. In una IBSS
(ad hoc network), sono disponibili solo i servizi denominati
"station services" (SS).
- Authentication
- Tramite questo servizio, viene condivisa la reciproca
identità tra due STA che vorranno comunicare. Se non verrà stabilito
un livello di autenticazione accettabile da entrambe le parti, il
processo di autenticazione fallirà. IEEE 802.11 supporta diversi processi
di autenticazione: si tratta tuttavia di un'autenticazione a "livello
di collegamento" (link level), mentre un'autenticazione
ad esempio di tipo "utente-utente" (user
level) è supportata ma non viene specificata nello standard. Un esempio
di schema di autenticazione supportato è lo schema "a chiave
condivisa" (shared key), ma questo implica che sia
implementata l'opzione WEP (wired equivalent privacy) di cui
parleremo in seguito.
- Deauthentication
- Questo servizio viene invocato quando dev'essere
cancellata un'autenticazione. In un ESS, come vedremo, l'autenticazione
è un prerequisito per un altro servizio, l'associazione; dunque al
momento della deautenticazione, viene a mancare anche l'associazione.
La deautenticazione è una notifica, non una richiesta e quindi non
può essere rifiutata da nessuna delle due parti.
- Privacy
- Per raggiungere un livello di riservatezza dei dati paragonabile
a quello di una rete cablata, in cui solo i dispositivi fisicamente
connessi alla rete possono ascoltare il traffico, lo standard IEEE
802.11 fornisce la possibilità di cifrare il contenuto dei messaggi
trasmessi dalle STA. Questa funzionalità viene ottenuta tramite il
servizio privacy. IEEE 802.11 specifica inoltre come opzionale il
meccanismo WEP (wired equivalent privacy) per la cifratura
dei dati. Il servizio di privacy può essere invocato solo per i frame
di tipo data e per alcuni frame che controllano l'autenticazione.
Tutte le STA iniziano a funzionare "in chiaro"
(senza cifratura), per realizzare i servizi di autenticazione e privacy.
Se il servizio privacy non viene invocato, tutti i messaggi verranno
trasmessi non cifrati.
I "distribution system services" (DSS) vengono
usati per distribuire i messaggi all'interno del "distribution
system" (DS) e per supportare il concetto di "mobilità".
- Distribution
- Questo è il servizio principale usato dalla STA 802.11.
Viene invocato da ciascun messaggio da o per una STA 802.11 operante
in una ESS. Con riferimento alla figura 4.1, consideriamo
un messaggio mandato dalla STA1 verso la STA4. Il messaggio viene
prima ricevuto dalla STA2 che è l'AP della BSS cui la STA1 appartiene.
L'AP invia il messaggio al servizio di distribuzione implementato
nel DS, il quale si occupa di distribuirlo alla STA3 (un altro AP)
la quale accede al WM per trasferire finalmente il messaggio al destinatario
STA4. Come il messaggio verrà trasmesso all'interno del DS non viene
specificato da IEEE 802.11: lo standard specifica delle informazioni
da fornire al DS per determinare l'AP di "uscita"
del suddetto messaggio. Tali informazioni vengono fornite attraverso
i 3 servizi: association, reassociation e disassociation.
- Integration
- Questo servizio permette il trasporto delle MSDU tra
una WLAN 802.11 e il DS attraverso un portal. Quindi i messaggi inviati
da una STA 802.11 che devono essere ricevuti da una LAN preesistente
attraverso un portal, invocheranno il servizio di integration prima
della distribuzione tramite il DS. Anche questo servizio non viene
coperto dallo standard.
Come abbiamo visto, vi sono altri servizi che supportano il servizio
di distribuzione (distribution): le informazioni necessarie al corretto
funzionamento del servizio distribution vengono fornite dai servizi
di "associazione"; cioè prima che un dato
possa essere gestito dal servizio distribution, una STA dev'essere
"associata".
Per capire il concetto di associazione, è necessario prima capire
il concetto di "mobilità".
Vi sono 3 tipi di transizioni che definiscono il concetto di
mobilità di un dispositivo IEEE 802.11:
- No-transition
- Questo tipo di mobilità prevede 2 sottoclassi
che sono in genere indistinguibili:
- Static ovvero nessun movimento.
- Local movement ovvero movimento nell'area di copertura delle
STA con cui stiamo comunicando.
- BSS-transition
- Questo tipo di mobilità riguarda i movimenti
di una STA da una BSS ad un'altra ma sempre all'interno della stessa
ESS.
- ESS-transition
- Questo tipo di mobilità riguarda i movimenti
di una STA da una BSS appartenente ad una ESS in una BSS appartenente
ad un'altra ESS. In realtà questa possibilità è supportata
solo in teoria, poichè IEEE 802.11 non garantisce il mantenimento
delle connessioni a più alto livello.
Queste categorie di mobilità sono supportate dai servizi di associazione.
- Association
- Tramite questo servizio, una STA comunica la propria
presenza all'AP della propria BSS. Viene sempre invocato da una STA.
Una STA non può associarsi con più di un AP in uno stesso
momento, questo per assicurare che il servizio di distribuzione trovi
un AP unico per trasportare i messaggi del DS. L'association è
sufficiente a gestire la mobilità di tipo "No-transition"
ed è necessaria ma non sufficiente a gestire la mobilità "BSS-transition".
- Disassociation
- Tramite questo servizio viene cancellata un'associazione
attualmente in corso. Il DS viene informato della disassociazione
dall'AP corrispondente. Può essere invocato sia dalla STA che
dall'AP. E' una notifica, non una richiesta e quindi non può essere
rifiutata da nessuna delle due parti.
- Reassociation
- Per supportare la transizione di tipo "BSS-transition"
è necessario invocare il servizio di riassociazione. Tramite
questo servizio, viene spostata un'associazione corrente da un AP
ad un altro. Questo tiene informato il DS della mappa tra AP e STA
quando quest'ultima si sposta da una BSS ad un'altra. La riassociazione
permette inoltre di cambiare i parametri di una associazione corrente
mentre la STA rimane associata all'AP. La riassociazione viene sempre
invocata dalla STA.
La seguente figura illustra le relazioni tra i vari servizi:
Figure 4.2: Relazioni tra i servizi IEEE 802.11
4.5 Livello MAC del protocollo IEEE 802.11
Lo standard IEEE 802.11 specifica un protocollo MAC che comprende
una serie di funzioni che realizzano tutte le possibili operazioni
di una WLAN 802.11. In generale, il livello MAC gestisce e mantiene
le comunicazioni tra le STA, coordinando l'accesso al mezzo trasmissivo
condiviso. Il livello MAC è in pratica il "cuore"
di una WLAN 802.11: esso si serve del livello fisico (PHY) per le
funzioni di rilevamento della portante (
carrier sensing), trasmissione
e ricezione dei frame 802.11.
4.5.1 Architettura del MAC
L'architettura del MAC IEEE 802.11 può essere descritta dalla figura
4.3:
Figure 4.3: Architettura del MAC IEEE 802.11
4.5.2 Distributed Cooordination Function(DCF)
Il meccanismo di accesso base è denominato Distributed Coordination
Function (DCF), basato sul meccanismo di "accesso multiplo
con rilevamento della portante e prevenzione delle collisioni"
(
Carrier Sense Multiple Access with Collision Avoidance-CSMA/CA).
Il DCF dev'essere implementato in tutte le STA e viene utilizzato
sia nelle reti ad hoc (IBSS) che nelle configurazioni con infrastruttura
(AP). Una STA, prima di trasmettere, deve "sentire"
il mezzo trasmissivo (vedi pagina
pageref)
per controllare che un'altra STA non stia trasmettendo. Se in base
alle regole del
carrier sensing la STA stabilisce che il mezzo
non è occupato, può trasmettere un frame. Se il frame trasmesso era
direttamente indirizzato ad un'altra STA (
unicast), quest'ultima
usa un immediato
positive acknowledgment (frame ACK) per indicare
la corretta ricezione del frame. Se quest'ultimo frame ACK non viene
ricevuto, perchè il mittente non lo riceve oppure perchè il destinatario
non è riuscito a ricevere correttamente il dato inviatogli, il mittente
programma la ritrasmissione del dato. Si noti che le due situazioni
appena descritte, ovvero non ricezione del frame ACK oppure mancata
trasmissione dello stesso da parte del destinatario, sono indistinguibili
da parte del mittente.
Il protocollo CSMA/CA impone che vi sia un intervallo di tempo specificato
tra le trasmissioni di due frame successivi. Questo intervallo viene
genericamente chiamato IFS (
Inter Frame Space)
62. Una STA che vuole trasmettere dovrà assicurarsi che il mezzo trasmissivo
risulti libero per l'adeguato IFS prima di provare a trasmettere.
Se al contrario il mezzo viene rilevato come "occupato"
, la STA deve rimandare la trasmissione fino al termine di quella
in corso. Dopo questo ritardo e anche immediatamente dopo una qualsiasi
trasmissione avvenuta con successo, una STA deve compiere la cosiddetta
procedura di
backoff. Questa procedura consiste nel selezionare
un ritardo casuale (
random backoff interval) e rimandare la
trasmissione decrementando un contatore (
random backoff interval
counter) ogni volta che il mezzo trasmissivo viene rilevato libero.
Questa procedura viene esaminata a pagina in
pageref.
Quanto appena descritto rappresenta l'accesso base secondo le regole
del DCF. E' tuttavia prevista dallo standard una modifica al meccanismo
di accesso base, che prevede lo scambio di due piccoli frame di controllo
RTS e CTS prima di ogni trasmissione dati, essenzialmente pensata
per ridurre ulteriormente le collisioni e ridurre i problemi derivanti
dalle situazioni di tipo "nodi nascosti". Questa
tecnica viene esaminata a pagina
pageref
ed il suo utilizzo è opzionale.
Per determinare lo stato del mezzo trasmissivo viene usato un meccanismo
di carrier-sense (controllo della portante), realizzato dal livello
fisico (PHY) a beneficio del MAC; il MAC stesso inoltre, realizza
un meccanismo di virtual carrier-sense. Se una STA opera con il metodo
di accesso base sommariamente descritto in
4.5.2,
allora può avere delle informazioni relative ad una trasmissione in
corso da parte di un'altra STA dal campo "Duration/ID"
(vedi
4.8) incluso nell'header dei frame.
Tramite questo campo la STA conosce il tempo per il quale il mezzo
trasmissivo risulterà ancora occupato, anche in caso di messaggi frammentati
su più frame.
Anche nel caso sia abilitato il meccanismo RTS/CTS, viene realizzato
il virtual carrier-sense, per mezzo di un contatore denominato NAV
(
Network Allocation Vector), che viene impostato opportunamente
tramite le informazioni contenute nei frame RTS e CTS. Vedremo in
dettaglio questa procedura a pagina
pageref.
Interframe space (IFS)
L'intervallo di tempo tra due frame consecutivi è detto IFS. Lo standard
definisce quattro diversi IFS, che definiscono 3 diversi livelli di
priorità nella procedura di accesso al mezzo trasmissivo. Più piccolo
è il tempo IFS, maggiore sarà la priorità dell'operazione che si basa
su quell'IFS. Gli IFS sono definiti come intervalli di tempo sul mezzo
trasmissivo e sono indipendenti dalla velocità di trasferimento del
canale. Gli IFS saranno differenti per le 3 implementazioni del livello
fisico previste dallo standard (radiazione infrarossa, direct sequence
spread spectrum e frequency hopping spread spectrum).
- Short IFS (SIFS)
- Questo IFS viene usato per l'acknowledgement
(ACK) immediato di un frame, per la risposta di tipo CTS (clear
to send) and un frame RTS (request to send), per delimitare
le trasmissioni delle varie MPDU (MAC protocol data unit) ovvero
le parti in cui vengono frammentate le già citate MSDU se le loro
dimensioni eccedono un limite prefissato; viene usato inoltre nella
risposta ad un polling del PCF e infine nelle risposte a qualsiasi
frame inviato dall'AP durante il contention-free period (CFP).
- Point coordination function IFS (PIFS)
- Questo IFS viene usato
dalle STA che operano in PCF per ottenere l'accesso al mezzo trasmissivo
all'inizio del CFP.
- Distributed coordination function IFS (DIFS)
- Questo IFS viene
usato dalle STA che operano in DCF per ottenere l'accesso al mezzo
e trasmettere frame contenenti dati oppure frame di controllo.
- Extended IFS (PIFS)
- E il più lungo IFS ed è usato da una stazione
che ha ricevuto un pacchetto di cui non è stata in grado di comprendere
il contenuto. Questo è necessario per proteggere la stazione (la quale
non comprende l'informazione di durata necessaria per il virtual carrier
sense) da collisioni con i futuri pacchetti appartenenti al messaggio
corrente.
Alcuni IFS sono stabiliti dallo standard in modo assoluto. Altri vengono
definiti relativamente ad altre grandezze quali lo
slot-time.
Lo slot-time è una grandezza molto importante proprio perchè è usato
come unità di misura di intervalli di tempo quali gli IFS ma anche
come unità di misura nel meccanismo del random backoff. L'intervallo
di backoff infatti risulta suddiviso in quanti di durata pari al valore
slot-time. Si veda a proposito il paragrafo successivo.
Osserviamo dunque alcuni valori derivati dallo standard[
1]:
| Intervallo | FHSS(frequency hopping spread spectrum) | DSSS(direct sequence spread spectrum) | Hi-rate DSSS | IR(radiazione infrarossa) |
| SIFS | 28μs | 10μs | 10μs | 10μs |
| Slot Time | 50μs | 20μs | 20μs | 8μs |
Table 4.5: IEEE 802.11: valori degli IFS per i vari PHY
Gli altri IFS possono essere ottenuti con le seguenti formule:
|
PIFS=SIFS×SlotTime DIFS=SIFS+2×SlotTime |
| (4.1) |
Random Backoff
Abbiamo visto che il meccanismo carrier-sense dev'essere invocato
ogni volta che una STA vuole trasmettere un frame. Se il mezzo trasmissivo
è occupato, la trasmissione dev'essere ritardata fino a quando
non si trova il mezzo libero per un periodo di tempo continuato
63 maggiore o uguale al DIFS o al EIFS se l'ultimo frame non era stato
ricevuto correttamente. Dopo questo intervallo (DIFS o EIFS), e se
il contatore di backoff (
backoff timer) non è già
pari a 0, la STA genera un periodo di ritardo casuale (random backoff),
che ritarda ulteriormente la trasmissione. Questo processo è
stato previsto per minimizzare le collisioni derivanti dai tentativi
di accesso al mezzo da parte di più STA che avevano ritardato
la propria trasmissione a causa di uno stesso evento.
La durata del random backoff può essere espressa da:
|
BackoffTime=Random()×SlotTime |
| (4.2) |
ove "Random" è un intero pseudocasuale
uniformemente distribuito nell'intervallo [0,CW]. CW indica il
parametro detto
Contention Window, che rappresenta in pratica
un'unità di misura per il random backoff. CW è compreso
nell'intervallo [
CWmin,
CWmax], e la sua gestione può
essere descritta così:
- CW inizialmente assumerà il valore CWmin. Questo valore,
come anche CWmax dipendono dallo specifico PHY.
- I valori che CW può assumere in sequenza sono dati dalle potenze
crescenti di 2, meno 1, fino ad arrivare al valore CWmax.
- Ogni STA ha un contatore (retry counter) che viene incrementato
ogni volta che un frame non viene trasmessa con successo. Un incremento
del retry counter provoca un incremento di CW.
- Se CW raggiunge il valore CWmax, ulteriori tentativi di trasmissione
falliti non modificheranno il suo valore.
- CW verrà resettato a CWmin dopo ogni tentativo di trasmissione
concluso con successo
Figure 4.4: Valori e limiti del parametro CW
Alcuni valori dallo standard:
| Parametro | FHSS | DSSS | Hi-rate DSSS | IR |
| CWmin | 15 | 31 | 31 | 63 |
| CWmax | 1023 | 1023 | 1023 | 1023 |
Table 4.6: IEEE 802.11: valori dei limiti del CW per i vari PHY
Nella figura
4.5, possiamo vedere una possibile situazione
relativa alla procedura di backoff appena descritta.
Figure 4.5: Procedura di backoff
La STA "A" trasmette un frame mentre le altre
STA ritardano a causa di questa trasmissione. Alla fine di quest'ultima,
tutte le STA controllano il mezzo trasmissivo per un tempo pari a
DIFS, dopodichè tutte le STA eseguono la procedura di random
backoff. Risulta "vincente" la STA "C",
che possedeva un random backoff minore rispetto alle altre STA concorrenti.
Come si vede dalla figura
4.5, il timer di backoff
delle STA viene decrementato solo se quando il mezzo risulta libero.
Infatti, nel momento in cui la STA "C" vince
la contesa per l'accesso al mezzo, il timer di backoff delle STA concorrenti
"B" e "D" viene fermato
e il suo valore mantenuto. Al termine della trasmissione della STA
"C" viene osservato da tutte le STA un ritardo
pari a DIFS; successivamente la contesa per l'accesso al canale viene
risolta in favore della STA "D", che aveva un
valore residuo del random backoff timer minore rispetto alla concorrente
STA "B" ( si notino le differenze tra le aree
più scure in figura).
Procedura di accesso standard
La figura
4.6 illustra il meccanismo di
accesso base del DCF:
Figure 4.6: Procedura di accesso base
Riassumendo:
- In generale una STA che opera secondo le regole del DCF, trasmette
un frame quando rileva il mezzo libero continuamente e per un tempo
pari a DIFS (o EIFS).
- Se il mezzo viene invece rilevato come occupato, viene seguita la
procedura di backoff descritta a pagina pageref.
Una caratteristica importante del MAC IEEE802.11 consiste nella cosiddetta
capacità di frammentazione/deframmentazione delle unità
informative che vengono trasmesse e ricevute dalle STA. Si possono
dunque frammentare le MSDU (MAC Service Data Unit) e le MMPDU (MAC
Management Protocol Data Unit), in unità più piccole, che
abbiamo finora chiamato frame e che lo standard IEEE 802.11 indica
anche con l'acronimo MPDU (MAC Protocol Data Unit).
Figure 4.7: IEEE 802.11: frammentazione
La frammentazione delle MSDU e delle MMPDU è prevista per aumentare
l'efficienza delle trasmissioni, poichè unità informative
più piccole sono più facilmente trasferibili, anche nel
caso che le condizioni del canale siano sfavorevoli (interferenze,
traffico elevato etc.).
L'operazione di ricomposizione di una MSDU (o MMPDU) frammentata viene
chiamata deframmentazione. Solo le unità informative unicast
possono essere frammentate, mentre non è prevista questa possibilità
per i messaggi multicast o broadcast.
La frammentazione è gestita tramite il parametro "FragmentationThreshold",
che definisce la dimensione dei frame nei quali viene frammentata
una MSDU.
Possiamo vedere dalla figura
4.8 come una
STA che abbia avuto accesso al mezzo trasmissivo, possa usare il SIFS,
cioè il più breve degli intervalli di attesa, per trasmettere i vari
frammenti di una MSDU, senza quindi dover ricontendere l'accesso al
mezzo per ogni singolo frammento:
Figure 4.8: Trasmissione fragment-burst
In questo modo, una STA che ha accesso al mezzo continua a trasmettere,
ad intervalli di SIFS, le MPDU in cui ha frammentato una MSDU, fino
a che queste ultime MPDU non sono finite oppure finchè viene
mancato un ACK
64.
Procedura di accesso con meccanismo RTS/CTS
Nella figura
4.9, osserviamo la procedura di
accesso con meccanismo RTS/CTS:
Figure 4.9: Procedura di accesso con meccanismo RTS/CTS
* Nodi Nascosti
Si dice che un nodo (STA) A è nascosto ad un nodo B appartenente alla
stessa BSS, quando i due nodi sono fuori dalla reciproca portata radio,
cioè non possono comunicare direttamente.
Possiamo visualizzare, tramite la figura
4.10,
un possibile problema legato alla presenza di nodi nascosti:
Figure 4.10: Problema dei nodi nascosti
Le STA A e C non sentono le reciproche trasmissioni e, quindi, può
capitare che entrambe portino avanti due trasmissioni contemporanee
verso la STA B che si trova nel raggio di copertura di entrambe. Ovviamente
questo causa una serie di collisioni e la STA B non riceverà
correttamente i pacchetti che le altre STA tentano di inviargli. Per
ovviare a questo problema si usa il meccanismo RTS/CTS:
- Una STA che volesse trasmettere una MPDU verso un'altra STA (ad esempio
in figura 4.10 la STA A vorrebbe
trasmettere un dato alla STA B), dovrà prima inviare un frame
di tipo RTS diretto alla STA B. Le STA che possono ricevere correttamente
tale frame RTS, grazie al campo "Duration/ID"
contenuto nell'header di tale frame, aggiusteranno di conseguenza
il proprio NAV in modo da deferire l'accesso al mezzo poichè
un'altra STA ha iniziato una trasmissione. Nel caso visualizzato in
figura 4.10, la STA C non riceve
le informazioni contenute nel frame RTS inviato dalla STA A.
- La STA B, ricevuto il frame RTS, risponde con il frame CTS (dopo un
intervallo SIFS), comunicando di essere pronta ad accettare dei dati.
Il frame CTS verrà stavolta ricevuto dalla STA C, la quale aggiusterà
il proprio NAV in base a quanto contenuto nell'header del suddetto
frame CTS. Dunque, la STA C, pur non sentendo l'inizio della trasmissione
della STA A poichè fuori dal raggio di copertura di quest'ultima,
sente comunque la trasmissione della STA B, e, ritarda l'accesso al
mezzo trasmissivo fino alla fine della trasmissione in corso.
- Il frame di dati veri e propri sarà inviato esattamente un SIFS
dopo la trasmissione del frame CTS, senza controllare il mezzo.
L'uso di questo meccanismo è opzionale, e, poichè provoca
un leggero
overhead65 dovuto alla presenza dei 2 frame RTS/CTS, si può configurare
in modo che venga attivato solo per le trasmissioni di frame di dimensioni
significative. Tutti i frame di dimensione maggiore del parametro
RTSThreshold, saranno soggetti al meccanismo RTS/CTS. Se il
valore di RTSThreshold è 0, vuol dire che tutti i frame saranno
inviati col meccanismo RTS/CTS. Se il valore di RTSThreshold è
maggiore della massima dimensione consentita per le MSDU, allora nessun
frame sarà inviato col meccanismo RTS/CTS. Il meccanismo RTS/CTS
può essere usato anche in caso di frammentazione delle MSDU.
Figure 4.11: Meccanismo RTS/CTS e frammentazione
Come si vede dalla figura
4.11, i frame
RTS/CTS vengono scambiati solo per il primo frammento, e, in seguito,
viene usato ai fini del settaggio NAV, il campo "Duration/ID"
dei frame dati e dei frame ACK che li seguono.
Broadcast e multicast
La trasmissione broadcast (o multicast) di frame dati, in generale
non è soggetta al meccanismo RTS/CTS. Questo è vero però
solo per i frame in cui il bit
ToDS (vedi
4.8)
è pari a 0, nel qual caso viene usata la procedura di accesso
base e non viene inviato alcun frame ACK. Nel caso in cui un frame
broadcast (o multicast) abbia invece il bit ToDS pari a 1, tale frame
segue le regole della procedura di accesso con RTS/CTS, questo perchè
il suddetto frame è diretto verso l'AP.
La suddetta distinzione in base al valore del bit ToDS si riflette
anche sulla ritrasmissione dei frame: solo nel caso in cui ToDS sia
pari a 1 è previsto il meccanismo di recupero dei dati non ricevuti
correttamente (ovvero la ritrasmissione dei frame).
Trasmissione degli ACK
Tutti i frame unicast di tipo dati richiedono espressamente una "conferma
di ricezione", effettuata dal destinatario tramite la trasmissione
del frame ACK (
acknowledgment), come abbiamo già accennato.
Tale frame dev'essere inviato, a prescindere dallo stato del mezzo
trasmissivo, esattamente un SIFS dopo un frame dati. Nel caso in cui
il suddetto frame dati abbia il bit ToDS pari a 1, è l'AP che
deve inviare il frame ACK. Come abbiamo già visto, non viene
inviato alcun ACK per i frame broadcast (o multicast).
La STA che invia un frame dati con richieste di ACK stabilisce che
la propria trasmissione è fallita se non riceve un ACK entro
il tempo definito dal parametro ACKTimeout.
Procedure di recupero
Il recupero degli errori, ovvero dei frame non ricevuti correttamente,
è gestito dalla STA mittente, tramite ritrasmissione dei suddetti
frame finchè gli stessi non vengono ricevuti correttamente oppure
finchè non viene raggiunto un certo limite (
retry limit).
Ogni STA possiede due contatori detti STA short retry count
(SSRC) e STA long retry count (SLRC).
Il contatore SSRC viene incrementato ogni volta che fallisce la trasmissione
di un frame MAC appartenente ad una MSDU o ad una MMPDU la cui dimensione
è minore o uguale al valore RTSThreshold, mentre tale contatore
viene resettato quando la suddetta trasmissione avviene con successo.
Il contatore SLRC viene incrementato ogni volta che fallisce la trasmissione
di un frame MAC appartenente ad una MSDU o ad una MMPDU la cui dimensione
è maggiore al valore RTSThreshold, mentre tale contatore viene
resettato quando la suddetta trasmissione avviene con successo.
I frame ritrasmessi sono contraddistinti dal valore 1 nel campo
Retry.
66.
I tentativi di ritrasmissione di una MSDU o MMPDU finiscono quando
il contatore SSRC raggiunge il limite imposto dal parametro ShortRetryLimit,
o quando il contatore SLRC raggiunge il limite imposto dal parametro
LongRetryLimit. Quando viene raggiunto almeno uno di questi
limiti, la MSDU o la MMPDU in questione viene scartata.
Lo standard IEEE 802.11 fissa a 7 il valore dei limiti ShortRetryLimit
e LongRetryLimit.
Rilevamento dei frame duplicati
Una STA dev'essere in grado di rilevare, a livello MAC, la ricezione
di frame già ricevuti. Questo processo è facilitato dal campo
Sequence
Control che è composto da un numero di sequenza e da un numero di
frammento e che è incluso in ogni frame di tipo dati e management.
Dunque, le MPDU che fanno parte di una stessa MSDU avranno lo stesso
numero di sequenza e le diverse MSDU avranno (con elevata probabilità)
un numero di sequenza differente. Il numero di sequenza è generato
dalla STA trasmittente ed è parte di una sequenza crescente di interi.
La STA ricevente mantiene una
cache dei dati <Address 2 - numero
di sequenza - numero di frammento>
67 più recenti. La stessa STA scaricherà dunque tutti quei frame che
hanno il bit
Retry settato e i cui valori <Address 2 - numero
di sequenza - numero di frammento> corrispondono ad un
record
della cache. La STA effettuerà comunque la procedura di ACK (se il
frame lo richiede) anche se poi scarterà il frame a causa della duplicazione.
4.5.3 Point Coordination Function (PCF)
Il MAC IEEE 802.11 prevede un metodo di accesso opzionale chiamato
Point Coordination Function (PCF), che può essere usato però
solo nelle reti con infrastruttura. Questo metodo di accesso prevede
che un'entità logica detta
Point Coordinator (PC), che risiede
nell'AP della BSS, stabilisca istante per istante mediante un'operazione
di
polling quale STA sia autorizzata a trasmettere. Questo
tipo di accesso potrebbe richiedere un coordinamento ulteriore nel
caso in cui, nella stessa area e sullo stesso canale, si trovassero
ad operare due BSS in PCF. Quest'ultima situazione non è specificata
dallo standard.
Il PCF utilizza un meccanismo virtual carrier-sense insieme ad un
meccanismo d'accesso basato su priorità. Il metodo d'accesso fornito
dal PCF può dunque essere utilizzato per realizzare un accesso di
tipo contention-free (CF), ovvero il PC controlla integralmente
la trasmissione delle STA cosicchè si elimina la contesa di queste
ultime per il mezzo trasmissivo.
E' previsto dallo standard che i metodi DCF e PCF debbano coesistere:
quando in una BSS è presente un PC, i due metodi di accesso si alternano
creando un Contention-free Period (CFP) cui segue un Contention
Period (CP).
Tutte le STA di una BSS in cui è presente un PC attivo, possono operare
correttamente e, se associate con l'AP in cui risiede appunto l'entità
PC, possono ricevere frame in accordo alle regole del PCF. Così come
è opzionale per un AP agire da PC, allo stesso modo è opzionale per
una STA implementare la possibilità di rispondere alle richieste del
PC durante il CFP. Le STA che implementano tale possibilità sono riferite
nello standard come STA
CF-Pollable. La procedura d'accesso
verrà descritta a pagina
pageref.
Struttura e temporizzazione del CFP.
Figure 4.12: Alternanza tra CFP e CP
Il metodo PCF è usato per il trasferimento dei frame durante il CFP.
Il CFP si alterna nel tempo con il CP, durante il quale è il metodo
DCF a controllare il trasferimento dei frame. Lo standard IEEE 802.11
impone che sia comunque sempre presente un CP di durata sufficiente
a trasmettere almeno una sequenza completa di frame. Questa possibilità
viene imposta dallo standard per permettere la trasmissione dei frame
di tipo Management
68.Ciascun CFP comincia con un frame speciale detto
beacon, che
contiene delle informazioni importanti sul CFP, tra le quali un elemento
di tipo DTIM (
Delivery Traffic Indication Map), che è a sua
volta un particolare pacchetto TIM (
Traffic Indication Map).
| Ordine | Elemento informativo |
| 1 | Timestamp |
| 2 | Beacon Interval |
| 3 | Capability Information |
| 4 | SSID |
| 5 | Supported Rates |
| 6 | FH Parameter Set |
| 7 | DS Parameter Set |
| 8 | CF Parameter Set |
| 9 | IBSS Parameter Set |
| 10 | TIM |
Table 4.7: Composizione del payload dei frame Beacon
Il campo CF Parameter Set è così strutturato:
Figure 4.13: Formato dell'elemento CF parameter Set
Il beacon che segna l'inizio del CFP ha il campo
CFPCount pari
a 0, altrimenti tale campo indica quanti DTIM (incluso il frame attuale)
verranno trasmessi prima dell'inizio del prossimo CFP. Il PC genera
dei periodi CFP ad intervalli pari al valore del parametro
CFPRate,
espresso in termini di intervalli DTIM e comunicato alle STA della
BSS tramite il campo
CFPPeriod del CF Parameter Set visto in
figura
4.13. Possiamo vedere un esempio
nella figura seguente:
Figure 4.14: Beacon e CFP
In questo esempio, il CFP si ripete ogni 2 intervalli DTIM e l'intervallo
DTIM a sua volta è pari a 3 intervalli beacon.
Il PC può terminare un CFP prima della sua fine prevista. Tale fine
è specificata dal parametro
CFP-MaxDuration anch'esso incluso
nel CF Parameter Set. Il termine prematuro del CFP potrebbe essere
dovuto, ad esempio, alla mancanza di traffico da gestire. Come si
vede dalla figura
4.12, il traffico
contention che
segue il periodo CFP, potrebbe causare un ritardo nella trasmissione
del beacon che inizia il prossimo CFP. In questa situazione, la durata
del successivo periodo CFP risulta diminuita proprio del suddetto
ritardo. Lo standard prevede che in caso di mezzo trasmissivo occupato
dalla trasmissione DCF di un frame, la trasmissione del beacon debba
essere ritardata fino al completamento del frame DCF. Quindi, nell'alternanza
tra i due metodi di accesso, viene garantita una durata minima per
il CP, ma non viene garantita una durata minima per il CFP, anzi ne
viene definita una durata massima. Questo significa che il CFP non
garantisce alcuna banda minima di trasmissione.
Procedura di accesso base
Il metodo di accesso contention-free è basato su uno schema
di tipo polling (interrogazione) controllato dall'entità logica
detta PC che risiede nell'AP di una BSS con topologia infrastrutturata.
Il PC acquisisce il controllo del mezzo trasmissivo all'inizio di
ogni CFP, e tenta di mantenere questo controllo per tutta la durata
del CFP usando un IFS minore di quello usato dalle STA che operano
secondo le regole del DCF. Abbiamo già accennato al suddetto IFS (PIFS
ovvero Point Coordination Function IFS), e dalla tabella possiamo
effettivamente vedere come il suo valore sia inferiore al DIFS, che
è il tempo IFS che viene usato dalle STA che operano secondo le regole
dal DCF per intercalare le trasmissioni consecutive dei frame. Quindi,
all'inizio di un CFP, il PC controlla il mezzo trasmissivo, e, se
risulta libero per un tempo maggiore o uguale a PIFS, il PC trasmette
un beacon con il CF Parameter set e l'elemento DTIM. Tutte le altre
STA settano il proprio NAV proprio in base all'informazione CFP-MaxDuration,
in modo da evitare possibili trasmissioni non causate da poll del
PC, sia da parte di STA CF-Pollable che da parte di tutte le altre
STA. Le STA CF-Pollable e il PC non usano il meccanismo RTS/CTS durante
il CFP. Quando una STA CF-Pollable viene interrogata dal PC, essa
può trasmettere soltanto una MPDU, diretta verso il PC o verso una
qualsiasi altra STA, e può effettuare un cosiddetto piggyback dell'ACK
per un frame ricevuto dal PC, usando un particolare sottotipo di frame
dati. La ricezione del frame appena inviato dalla STA che è stata
interrogata dev'essere confermata con l'invio di un frame ACK dopo
un SIFS, proprio come col metodo DCF, a conferma del fatto che il
metodo PCF non è un'entità logica a se stante ma dipende strettamente
dal DCF. Se tale conferma non avviene (o la STA mittente non la riceve),
la STA che è stata autorizzata a trasmettere dal PC non può ritrasmettere
il frame fino a quando non viene interrogata nuovamente dal PC, oppure
può decidere di ritrasmetterlo durante il CP. Il PC può invece ritentare
la trasmissione di un frame di cui non ha avuto l'ACK, dopo un tempo
PIFS.
Le figure
4.15 e
4.16,
illustrano i casi appena descritti, ovvero una trasmissione PC-STA
e una trasmissione STA-STA, entrambe durante il CFP.
Figure 4.15: PCF: trasmissione PC verso STA
Figure 4.16: PCF: trasmissione STA verso STA
La presenza e la gestione del NAV durante il CFP sono utili per facilitare
l'operatività delle reti nella situazione di sovrapposizione dei rispettivi
periodi CFP e delle rispettive aree di copertura. Tuttavia, come abbiamo
già detto, il modo in cui tali BSS in questa situazione, coordinano
i rispettivi CFP, non è coperto dallo standard IEEE 802.11.
Definiamo gli istanti in cui, nominalmente, dovrebbe iniziare la trasmissione
del beacon che segna l'inizio del CFP come TBTT (Target Beacon
Trasmission Time). In questi istanti tutte le STA, eccetto l'AP,
inizializzeranno il proprio NAV al valore CFP-MaxDuration. Questo
evento ha 2 effetti:
- Impedisce alle STA diverse dall'AP di prendere il controllo del mezzo
durante il CFP.
- Risolve il problema dei nodi nascosti, così come faceva il meccanismo
RTS/CTS per il DCF.
Una STA che vuole unirsi ad una BSS in cui opera un PC, usa le informazioni
contenute in elemento del CF Parameter Set, il
CFPDurRemaining,
presente nei beacon e nei frame di tipo
Probe Response, il
cui uso verrà descritto in seguito. Usando tali informazioni, le nuove
STA aggiornano il proprio NAV in modo da non interferire con un eventuale
CFP in corso.
Il PC può concludere anzitempo il CFP trasmettendo un frame di tipo
CF-End (o CF-End+ACK): una STA che riceva uno di questi
due frame, a qualsiasi BSS essa appartenga, è autorizzata a resettare
il proprio NAV.
Riepilogo delle regole del metodo PCF
E' opportuno riepilogare le regole che definiscono il metodo d' accesso
PCF:
- Il PC può inviare dei frame di tipo unicast, broadcast o multicast
ad ogni STA attiva ed anche ad eventuali STA CF-Pollable ma in Power
Save (in seguito vedremo le modalità definite power save).
- Durante il periodo CFP, ogni STA CF-Pollable deve operare dopo un
SIFS nel seguente modo:
- se ha ricevuto un frame di tipo Data+CF-Poll oppure Data+CF-ACK+CF-Poll,
deve rispondere con un frame di tipo Data+CF-ACK oppure semplicemente
con un frame CF-ACK se non ha dati da inviare
- se ha ricevuto un frame di tipo CF-Poll deve rispondere con
un frame di tipo Data oppure Null
- se ha ricevuto un frame di qualsiasi altro tipo (dati o management),
deve rispondere con un frame di tipo ACK
- Le STA non CF-Pollable si comportano praticamente seguendo le regole
del metodo DCF, e quindi rispondono alla ricezione di un frame di
qualsiasi tipo (dati o management) usando un frame ACK dopo
un SIFS.
- Quando una STA CF-Pollable viene interrogata dal PC con un Poll (frame
Data+CF-Poll, Data+CF-ACK+CF-Poll, CF-Poll o CF-ACK+CF-Poll), può
mandare un frame verso una STA qualsiasi. Se tale frame è diretto
al PC, o deve passare attraverso il PC perchè diretto al DS, il PC
stesso deve confermare la ricezione del frame usando l' indicazione
CF-ACK (frame Data+CF-ACK, CF-ACK, Data+CF-ACK+CF-Poll, CF-ACK+CF-Poll
o CF-End+CF-ACK) dopo un SIFS. Se invece il frame è diretto verso
una STA (che sia CF-Pollable oppure no), la STA destinataria confermerà
con un frame ACK dopo un SIFS.
Polling list
Il PC può realizzare 2 diverse forme del servizio contention-free:
con o senza interrogazioni. Queste due modalità sono comunicate tramite
l' elemento Capability Information che si trova nei frame beacon,
probe response, association response, reassociation response
che vengono inviati dall'AP.
Figure 4.17: Struttura del campo Capability Information
In particolare, i campi CF-Pollable e CF-Poll Request vengono così
interpretati quando i frame in cui sono contenuti provengono da un
AP/PC:
| CF-Pollable | CF-Poll Request | Significato |
| 0 | 0 | Nessuna funzione Point Coordination presso l'AP |
| 0 | 1 | Point Coordination presso l'AP solo per il trasporto
dei pacchetti da e verso il DS (nessun polling) |
| 1 | 0 | Point Coordination presso l'AP sia per il trasporto
dei pacchetti verso il DS che per il polling |
| 1 | 1 | Riservato |
Table 4.8: Uso dei campi CF-Pollable e CF-Poll Request da parte dell'AP
Se il PC realizza un CFP soltanto per il trasporto di frame verso
il DS, così come può fare durante il funzionamento DCF, esso non ha
bisogno di creare e gestire una polling list e non genererà
quindi mai dei frame contenenti l'indicazione CF-Poll. Se al contrario,
il PC prevede di usare le interrogazioni (poll) per le STA che lo
richiedono (CF-Pollable), esso genera e mantiene una polling list
e la usa per generare dei frame con l'indicazione CF-Poll, ovvero
per generare le interrogazioni alle STA incluse nella lista stessa.
La polling list è solo un costrutto logico e non viene resa disponibile
all'esterno del PC.
Analizziamo ora le procedure minime di gestione della polling list,
osservando che un AP/PC può implementare varie tecniche per la suddetta
gestione ma queste sono fuori dalla copertura dello standard IEEE
802.11:
- Quando la polling list è popolata, durante il CFP il PC deve mandare
almeno un frame di tipo CF-Poll ad una STA inclusa nella polling list.
- Le STA nella polling list sono interrogate in ordine di AID (Association
Identifier) crescente69. Il valore AID è un identificativo di 16 bit, di valore compreso
tra 1 e 2007, che viene assegnato alla STA dall'AP appunto in fase
di associazione (Association), durante la quale la STA stessa comunica
il suo futuro comportamento in base alla seguente tabella (i campi
CF-Pollable e CF-Poll request sono compresi nell'elemento Capability
Information presente nei frame di tipo Association e Reassociation
Request):
| CF-Pollable | CF-Poll Request | Significato |
| 0 | 0 | La STA non è CF-Pollable |
| 0 | 1 | La STA è CF-Pollable ma non richiede di essere messa
nella polling list |
| 1 | 0 | La STA è CF-Pollable e richiede di essere messa nella
polling list |
| 1 | 1 | La STA è CF-Pollable e richiede di non essere mai interrogata |
Table 4.9: Uso dei campi CF-Pollable e CF-Poll Request da parte delle STA
- Se rimane tempo durante il CFP, tutti i frame CF sono stati inviati
e tutte le STA della polling list sono state interrogate, il PC può
decidere di:
- generare uno o più frame CF-Polls verso una o più STA della polling
list
- mandare frame di tipo dati o management a una o più STA (anche non
appartenenti alla polling list).
- Se il CFP termina prima che tutte le STA della polling list vengano
interrogate, la polling list riprenderà dal punto in cui si è interrotta
nel successivo periodo CFP.
Come abbiamo visto nella tabella
4.9 , una STA
comunica la propria posizione nei confronti della polling list al
momento dell'associazione o riassociazione. Tale posizione può essere
modificata tramite il servizio di riassociazione. Sempre dalla stessa
tabella, possiamo notare che c'è anche la possibilità per una STA
di essere CF-Pollable ma di non voler essere mai interrogata. Questa
possibilità che può sembrare inutile, sarà esaminata meglio nella
sezione dedicata al
Power Save.
Illustriamo ora le procedure che consentono a tutte le STA di una
BSS di rimanere sincronizzate con un clock comune. La sincronizzazione
è basata su una funzione, gestita da ogni singola STA, detta TSF (Timing
Synchronization Function) e su un timer, il TSF Timer.
Sincronizzazione nelle WLAN IEEE 802.11 con infrastruttura
In una WLAN IEEE 802.11 con infrastruttura, l'AP provvederà a realizzare
la funzione TSF e controllerà il clock comune. L'AP trasmetterà periodicamente
dei frame di tipo beacon, contenenti una copia (timestamp,
vedi descrizione del frame beacon) del proprio TSF Timer, per consentire
alle altre STA della BSS di sincronizzarsi con quest'ultimo. Una STA
che riceve questo beacon, deve accettare senza condizioni le informazioni
relative al timestamp dell'AP e aggiustare il proprio TSF Timer in
base al timestamp stesso.
* Generazione e trasmissione dei beacon
L'AP dunque genera dei beacon ad intervalli pari al valore
BeaconPeriod,
stabilendo perciò la temporizzazione della BSS. Abbiamo già definito
a pagina
pageref col termine TBTT
gli istanti in cui l'AP nominalmente, ovvero in mancanza di traffico
in corso e quindi con il mezzo trasmissivo libero, dovrebbe iniziare
la trasmissione di un frame di tipo beacon. Possiamo osservare un
esempio nella figura
4.18:
Figure 4.18: Trasmissione dei beacon in una BSS
* Ricezione dei beacon
Una STA appartenente ad una WLAN IEEE 802.11 con infrastruttura, deve
usare le informazioni contenute nei beacon solo se il campo BSSID
coincide con l'indirizzo MAC dell'AP che gestisce la BSS di cui la
STA fa parte. Se il suddetto confronto è positivo, la STA modifica
il proprio timer TSF con il valore del timestamp ricevuto col beacon,
altrimenti significa che ha ricevuto il beacon di un'altra BSS, che
deve ignorare.
Sincronizzazione nelle WLAN IEEE 802.11 ad hoc
La funzione TSF in una WLAN ad hoc, o IBSS, è implementata con un
algoritmo distribuito cui prendono parte tutte le STA della
IBSS. Una qualsiasi STA è in grado di generare e trasmettere beacon,
in accordo alla procedura che vedremo, e le altre STA devono operare
le modifiche, al proprio timer TSF, solo se il valore timestamp, ricevuto
tramite il beacon o frame di tipo probe response, è in ritardo rispetto
al proprio.
* Generazione dei beacon
La generazione dei beacon è distribuita. Il periodo di trasmissione
dei beacon (beacon period) è incluso nei frame di tipo beacon o probe
response, e tutte le STA devono adottare questo parametro al momento
in cui si uniscono alla IBSS. Il parametro beacon period è stabilito
dalla STA che inizializza la IBSS. Il beacon period a sua volta definisce
gli istanti TBTT. Ad ogni TBTT ogni STA deve:
- Sospendere qualsiasi eventuale procedura di backoff in corso.
- Calcolare un ritardo casuale, uniformemente distribuito nell'intervallo
[0 ; 2×CWmin×SlotTime].
- Aspettare questo ritardo casuale, come nella procedura di backoff.
- Se durante quest'attesa viene ricevuto un beacon generato da un'altra
STA, viene cancellato il ritardo casuale calcolato e viene abbandonata
la procedura di trasmissione del beacon, riprendendo eventuali backoff
sospesi.
- Se invece non viene ricevuto alcun beacon durante l'attesa, allora
la STA invia il beacon con il proprio timestamp.
Figure 4.19: Trasmissione dei beacon in una IBSS
Si noti che è possibile che più di una STA in una IBSS generi e invii
un beacon subito dopo il TBTT, o a causa di una non corretta ricezione
di un beacon inviato da un'altra STA, o a causa di collisione tra
le trasmissioni dei beacon stessi.
* Ricezione dei beacon
Una STA appartenente ad una IBSS accetta le informazioni contenute
in ogni beacon ricevuto solo se il sottocampo IBSS dell'elemento Capability
Information è posto ad 1 ed il contenuto del campo SSID del beacon
è uguale all'indirizzo MAC della IBSS. In questo caso, la STA modificherà
il proprio timer TSF con il valore ricevuto con il beacon solo se
quest'ultimo è in ritardo rispetto al proprio TSF .
4.6 Power management e modalità Power Save
4.6.1 Power management in una WLAN con infrastruttura
Relativamente al consumo di potenza, una STA può trovarsi in uno dei
seguenti 2 stati:
- Awake
- la STA funziona a pieno regime.
- Doze
- la STA non riceve nè trasmette e perciò consuma pochissima
potenza.
Una STA si sposta da uno stato all'altro in base ai cosiddetti
Power
Management Modes (modalità di gestione della potenza). Queste modalità
sono riassunte nella tabella
4.10.
Una STA che voglia cambiare modalità di funzionamento deve comunicarlo
all'AP tramite il bit
Power Management contenuto nel Frame
Control Field dei pacchetti
70. Il valore di questo bit indicherà all'AP quale sarà, a conclusione
dello scambio di frame in corso durante il quale non può ovviamente
cambiare nulla, la modalità di funzionamento scelta dalla STA. Se
la modalità scelta è la modalità PS (
Power Save) l'AP non deve
trasmettere alcuna MSDU alla STA in PS, bensì deve conservare tutto
il traffico relativo alla STA e trasmetterglielo in momenti prestabiliti.
La STA in PS ascolterà il canale periodicamente per ricevere dei frame
di tipo beacon nei quali trova l'elemento TIM (Traffic Indication
Map). La ricezione dei beacon, relativamente alla procedura di gestione
degli elementi TIM, è regolata dai parametri ListenInterval
e ReceiveDTIMs.
In particolare, il parametro ListenInterval viene comunicato dalla
STA all'AP al momento dell'associazione e indica all'AP in quali beacon
la STA sarà in ascolto
71. Il parametro ReceiveDTIMs, invece, è comunicato dalla STA all'AP
al momento del cambio di modalità operativa (da AM a PS), ed indica
se la STA in questione riceverà ed interpreterà o meno i beacon con
elemento DTIM.
In pratica, l'AP costruisce l'elemento TIM come una mappa virtuale
del traffico che esso mantiene in memoria per tutte le STA che si
trovano in PS. Quest'ultime, ricevendo e analizzando il TIM contenuto
nei beacon, possono sapere se l'AP ha del traffico in attesa destinato
ad esse, ed agire di conseguenza ovvero:
- In una BSS operante col metodo DCF, o durante il CP che segue il CFP
se la BSS opera col metodo PCF, la STA in PS trasmette un frame di
tipo PS-Poll (Power Save Poll) all'AP per segnalare
che è pronta a ricevere il traffico bufferizzato nell'AP stesso. L'AP
risponde subito con la MSDU bufferizzata oppure può confermare (ACK)
la ricezione del frame PS-Poll e rispondere più tardi.
- Se il TIM indica che il frame bufferizzato verrà inviato durante il
CFP, la STA (che sarà dunque una STA CF-Pollable), non manderà alcun
frame PS-Poll, ma aspetterà il proprio turno all'interno del CFP per
ricevere il traffico bufferizzato nell'AP, rimanendo in AM per tutta
la durata del CFP stesso.
Nel caso in cui almeno una STA della BSS sia in PS, l'AP deve bufferizzare
tutto il traffico broadcast e multicast e trasmetterlo alla STA (o
alle STA) immediatamente dopo la trasmissione del primo beacon che
contiene un'indicazione di tipo DTIM (vedi pagina
pageref).
| Active Mode (AM) | La STA può ricevere frame in qualsiasi momento. In
AM la STA si trova nello stato Awake. Se la STA è presente nella polling
list dell'AP, essa deve rimanere in AM per tutta la durata del CFP |
| Power Save Mode (PS) | La STA si trova nello stato Doze e passa in Awake solo
per ascoltare dei beacon prestabiliti (in base al ListenInterval),
per ricevere traffico broadcast o multicast bufferizzato dall'AP (in
base al ReceiveDTIMs), per trasmettere dei frame di tipo PS-Poll ed
aspettare risposta agli stessi oppure per ricevere, durante il CFP
se si tratta di una STA CF-Pollable, il traffico bufferizzato |
Table 4.10: Modalità Power Management
Una STA che ritorna dallo stato Doze allo stato Awake deve compiere
una procedura di Clear Channel Assesment (CCA), con la quale
può riconoscere correttamente una sequenza di frame in corso e impostare
il proprio NAV.
Definizione dei TIM
Un elemento TIM contiene una mappa virtuale delle STA in PS
per le quali l'AP mantiene del traffico bufferizzato. In aggiunta,
il TIM indica anche la presenza di traffico bufferizzato di tipo broadcast
o multicast.
Ad ogni STA in una WLAN con infrastruttura viene assegnato, in fase
di associazione, un identificativo AID. E' proprio tramite questo
AID che l'AP costruisce il TIM. L'AID=0 è riservato al traffico broadcast
o multicast bufferizzato.
Possiamo distinguere due tipi di TIM:
* TIM
E' un elemento TIM standard che viene incluso in ogni frame di tipo
beacon.
E' un elemento TIM trasmesso al posto di un TIM normale, ad intervalli
pari al valore del parametro DTIMPeriod. Immediatamente dopo
la trasmissione di un beacon con un elemento DTIM, l'AP deve mandare
tutto il traffico bufferizzato di tipo broadcast e multicast, prima
di cominciare ad inviare quello unicast.
Figure 4.20: Power management nelle BSS con infrastruttura
La figura
4.20 illustra una situazione
possibile, con l'ipotesi che venga trasmesso un elemento DTIM ogni
3 elementi TIM. La linea più in alto rappresenta l'asse dei tempi.
La linea immediatamente sotto illustra l'attività dell'AP. Quest'ultimo
programma la trasmissione di un beacon affinché avvenga ad ogni istante
TBTT (ovvero ad intervalli
Beacon Interval). Siccome il mezzo
può essere occupato nell'istante TBTT, quindi la trasmissione del
beacon può essere ritardata. Notiamo che:
- subito dopo un beacon contenente un elemento DTIM, l'AP trasmette
tutto il traffico broadcast bufferizzato.
- la STA in PS la cui attività nel tempo è descritta dalla terza linea
???? CHIEDERE
Funzione Aging
L'AP implementa una funzione cosiddetta di aging, che serve
a cancellare il traffico che ha bufferizzato per un periodo di tempo
troppo lungo. Questa funzione dev'essere basata sul parametro ListenInterval
di ciascuna STA, ovvero la funzione dev'essere tale da non cancellare
il traffico prima che sia passato un intervallo pari a ListenInterval.
La definizione di una tale funzione è comunque fuori dalla trattazione
dello standard IEEE 802.11.
4.6.2 Power management in una WLAN ad hoc (IBSS)
La gestione della modalità power save nelle WLAN IEEE 802.11 ad hoc
è simile a quella vista per le WLAN che hanno una topologia con infrastruttura,
ovvero le STA conservano in un buffer il traffico unicast e multicast
destinato a STA che si trovano in modalità PS, e tale traffico viene
annunciato, prima di essere inviato, in periodi prestabiliti nei quali
tutte le STA, anche quelle in PS appunto, sono in ascolto. Il suddetto
annuncio viene fatto tramite un frame dedicato alle WLAN ad hoc, il
cosiddetto ATIM (
Ad hoc Traffic Indication Map)
72.
Figure 4.21: Power management in una IBSS
Facendo riferimento alla figura
4.21,
si definisce
ATIM Window l'intervallo di tempo in cui tutte
le STA, incluso quelle in PS, sono nello stato Awake. La durata della
ATIM Window è specificata dal parametro
ATIMWindow (che si
trova nell'elemento
IBSS Parameter Set dei frame di tipo beacon
e probe response
73). Essa inizia subito dopo l'istante TBTT e durante questa finestra
temporale possono essere trasmessi solo frame di tipo beacon o ATIM.
Quando una STA deve inviare una o più MSDU ad un'altra STA che si
trova in modalità PS, essa deve innanzitutto inviare verso la STA
in PS un frame ATIM durante l'ATIM Window. Sempre nella figura
4.21,
osserviamo come la STA A abbia la necessità di inviare un frame alla
STA B che si trova in PS. Allora, durante l'ATIM Window, la STA A
invia un frame ATIM direttamente indirizzato alla STA B, che si trova
nello stato Awake per tutta la durata dell'ATIM Window. La ricezione
di un ATIM di tipo diretto (
unicast) dev'essere confermata
dalla STA ricevente (con un frame di tipo ACK); in caso contrario,
la STA trasmittente tenta la ritrasmissione effettuando una procedura
di backoff, sempre all'interno della ATIM Window. I frame di tipo
ATIM di tipo
multicast non prevedono alcuna conferma. La STA
B, ricevendo un ATIM ad essa indirizzato, innanzitutto conferma tale
ricezione con un frame ACK diretto alla STA A, e poi rimane nello
stato Awake per tutta la durata del beacon interval corrente, in attesa
di ricevere la (o le) MSDU che la STA A deve inviarle. Se una STA
in PS non riceve alcun frame ATIM durante l'ATIM Window, può tornare
nello stato Doze alla fine della ATIM Window, fino al prossimo istante
TBTT ovvero all'inizio della successiva ATIM Window.
Quindi, alla fine della ATIM Window, possono iniziare le trasmissioni
di tutti i frame unicast che sono stati annunciati con successo (ovvero
quelli i cui relativi ATIM sono stati confermati con l'ACK) durante
l'ATIM Window, e possono iniziare le trasmissioni di tutti i frame
multicast e broadcast annunciati durante l'ATIM Window. La trasmissione
di questi frame segue le regole del metodo d'accesso DCF
74.
Nella IBSS, a causa della mancanza di un'entità quale un AP che coordini
la WLAN, una STA può soltanto stimare lo stato (AM o PS) di
una qualsiasi altra STA nella IBSS. Il modo in cui una STA compie
questa stima è fuori dalle specifiche dello standard IEEE 802.11,
anche se viene consigliato di basarsi sulle informazioni relative
al power management (bit Power Management nel Frame Control Field)
trasmesse dalle altre STA, oppure anche su informazioni quali una
cronologia delle trasmissioni riuscite e fallite verso le altre
STA. In quest'ultimo caso, l'uso del meccanismo RTS/CTS in una IBSS
può facilitare le stima dello stato PS delle STA: se un frame RTS
viene inviato ma non viene ricevuto un frame CTS, la STA mittente
può dedurre che la STA destinataria sia in modalità PS.
4.7 Procedure di Scan e Join
Le procedure di scan e join sono realizzate da una serie di funzioni
o primitive.
Una primitiva (in figura rappresentate come frecce) è una procedura
che permette di attivare ed usufruire dei servizi forniti dal livello
inferiore di un certo protocollo organizzato a livelli. In particolare
le primitive usate per le procedure di scan sono:
- MLME-SCAN.Request75
- MLME-SCAN.Confirm
Lo standard IEEE 802.11 prevede 2 tipi di scan:
- Active (attivo)
- Passive (passivo)
Lo scan può essere utilizzato dunque per:
- trovare una rete ed connettersi ad essa
- trovare un nuovo AP (Roaming)
- inizializzare una IBSS (ad hoc network)
Successivamente alla procedura di scan, tramite la quale si ricercano
le BSS e si acquisiscono i loro parametri, una STA può decidere di
effettuare una procedura di join, per richiedere di entrare a far
parte di una specifica BSS fra quelle trovate. Le primitive usate
per le procedure di scan sono:
- MLME-JOIN.Request
- MLME-JOIN.Confirm
Se si sceglie questo tipo di scan, la STA si mette in ascolto su ciascun
canale specificato nella ChannelList della primitiva MLME-SCAN.Request
(vedi
4.7.2), per il tempo specificato
sempre nella suddetta primitiva, aspettando di riconoscere dei frame
di tipo Beacon contenenti il particolare SSID
76 scelto, oppure aspettando di riconoscere un Beacon con l'SSID broadcast,
a seconda di quanto specificato nella primitiva MLME-SCAN.Request.
Alla fine dello scan, ovvero quando tutti i canali scelti sono stati
esaminati, viene usata la primitiva MLME-SCAN.Confirm per conservare
tutte le informazioni raccolte, a beneficio di un'eventuale successiva
procedura di join.
Questa modalità di scan implica la generazione di frame di tipo Probe
e la successiva elaborazione dei frame Probe Response. Al momento
della ricezione della primitiva MLME-SCAN.Request con il parametro
ScanType che indica uno scan attivo, una STA deve compiere la seguente
procedura:
Per ciascun canale da esaminare,
- aspetta che trascorra il tempo indicato dal parametro ProbeDelay;
- ottiene l'accesso al mezzo secondo le regole del metodo DCF;
- invia un frame di tipo Probe Request con l'indirizzo broadcast , il
SSID e il BSSID broadcast;
- resetta e fa partire un ProbeTimer
- la STA continua a mandare frame di tipo Probe finchè rileva il mezzo
libero e il ProbeTimer risulta inferiore al valore MinChannelTime,
dopodichè la STA resetta il proprio NAV e passa ad esaminare il successivo
canale. Può capitare che la STA rilevi il mezzo occupato quando tenta
di mandare frame di tipo Probe Request, quindi ritarda la trasmissione
dei suddetti frame ma rimane su quel canale al massimo fino a che
il ProbeTimer raggiunge il valore MaxChannelTime, dopodichè raccoglie
tutte le risposte ottenute e passa ad esaminare il canale successivo.
- resetta il proprio NAV e passa ad esaminare il canale successivo.
Figure 4.23: Scan Attivo
Regole per l'invio dei frame Probe Response
Una STA che riceve un frame di tipo Probe Request deve rispondere
con un frame di tipo Probe Response solo se il valore SSID nel probe
request è il SSID di tipo broadcast oppure se coincide esattamente
con il proprio SSID. I frame di tipo probe response vanno indirizzati
direttamente alla STA che ha inviato i frame probe request,
e vanno inviati secondo le regole del metodo DCF. Anche un AP deve
rispondere ad un probe response secondo le regole appena descritte.
In una IBSS invece, è la STA che ha generato l'ultimo beacon che ha
il compito di rispondere ai frame probe response. In questa situazione,
vi è la possibilità che più di una STA in una IBSS risponda ai probe
request, poichè è possibile che più di una STA nella IBSS invii un
beacon.
In ogni BSS, in un dato momento, dev'esserci almeno una STA nello
stato Awake (ovvero in modalità AM), per rispondere ai probe request.
Una STA che invia un beacon, deve rimanere nello stato Awake e rispondere
ai probe request fino a che non riceve un altro beacon con il valore
BSSID corrente. Nel caso in cui la STA che invia un beacon sia un
AP, esso deve sempre rimanere nello stato Awake per rispondere ai
probe request.
* Primitiva MLME-SCAN.Request
Questa primitiva supporta il processo di scan per la ricerca di BSS
nel raggio di copertura di una STA. Tale primitiva viene invocata
con i seguenti parametri:
| Nome | Tipo | Valori possibili | Descrizione |
| BSSType | Enumeration | INFRASTRUCTURE, INDIPENDENT, ANY_BSS | Specifica che tipo di BSS si vuole cercare |
| BSSID | MACAddress | Qualsiasi valido indirizzo MAC , individuale o di gruppo | Identifica uno specifico BSSID o lo scan usa il BSSID
di tipo broadcast |
| SSID | Stringa di ottetti | 0-32 ottetti | Identifica uno specifico SSID oppure lo scan usa il SSID
di tipo broadcast |
| ScanType | Enumeration | ACTIVE, PASSIVE | Specifica il tipo di scan, attivo o passivo |
| ProbeDelay | Intero | N/D | Ritardo (in μs) da usare prima di trasmettere un
frame Probe in caso di scanning attivo |
| ChannelList | Insieme ordinato di interi | Ciascun canale sarà scelto in base alla lista dei canali
disponibili per uno specifico PHY | Specifica la lista dei canali che saranno esaminati nello
scan |
| MinChannelTime | Intero | ≥ ProbeDelay | Il tempo minimo speso ad esaminare un singolo canale |
| MaxChannelTime | Intero | ≥ MinChannelTime | Il tempo massimo speso ad esaminare un singolo canale |
Table 4.11: Parametri della primitiva MLME-SCAN.Request
* Primitiva MLME-SCAN.confirm
Questa primitiva restituisce la descrizione dell'insieme delle BSS
rilevate durante il processo di scan. Tale primitiva viene invocata
con i seguenti parametri:
| Nome | Tipo | Valori possibili | Descrizione |
| BSSDescriptionSet | Insieme di elementi di tipo BSSDescription | N/D | E' un insieme, anche nullo, di istanze del tipo BSSDescription |
| ResultCode | Enumeration | SUCCESS, INVALID_PARAMETERS | Indica il risultato della primitiva MLME-SCAN.Confirm |
Table 4.12: Parametri della primitiva MLME-SCAN.Confirm
* Primitiva MLME-JOIN.Request
Questa primitiva serve a richiedere la sincronizzazione e quindi l'ingresso
in una BSS da parte di una nuova STA. I parametri di questa primitiva
sono:
| Nome | Tipo | Valori possibili | Descrizione |
| BSSDescription | BSSDescription | N/D | La descrizione della BSS cui la STA si vuole aggiungere.
Quest'elemento deriva direttamente dall'insieme ottenuto dalla primitiva
MLME-SCAN.Request |
| JoinFailureTimeout | Intero | ≥ 1 | Il limite, in termini di beacon interval, dopo il quale
la procedura di join viene interrotta senza successo |
| ProbeDelay | Intero | N/D | Ritardo (in μs) da usare prima di trasmettere un
frame Probe in caso di scanning attivo |
| OperationalRateSet | Insieme di interi | 2-127 (∀intero dell'insieme) | L'insieme dei data rate (in
unità da 500 kb/s) che la STA può usare all'interno della BSS. La
STA dev'essere in grado di ricevere usando ciascuno dei data rate
elencati nella lista. Questo elemento è un sottoinsieme del BSSBasicRateSet
definito in tabella 4.14 |
Table 4.13: Parametri della primitiva MLME-JOIN.Request
| Nome | Tipo | Valori possibili | Descrizione |
| BSSID | MACAddress | N/D | Il BSSID della BSS trovata |
| SSID | Stringa di ottetti | 1-32 ottetti | Il SSID della BSS trovata |
| BSSType | Enumeration | INFRASTRUCTURE, INDIPENDENT | Il tipo della BSS trovata |
| BeaconPeriod | Intero | N/D | Il periodo di trasmissione dei beacon della BSS trovata |
| DTIMPeriod | Intero | Come definito nel formato dei frame | Il periodo (espresso in numero di beacon period) dei
beacon contenenti un elemento DTIM |
| Timestamp | Intero | N/D | Il timestamp del frame appena ricevuto (probe response
o beacon) dalla BSS trovata |
| Localtime | Intero | N/D | Il valore del TSF della STA al momento della ricezione
del primo ottetto del campo Timestamp del frame ricevuto (probe response/beacon)
dalla BSS trovata |
| PHY Parameter Set | Come definito nel formato del frame | Come definito nel formato del frame | L'insieme dei parametri che caratterizza il PHY |
| CF Parameter Set | Come definito nel formato del frame | Come definito nel formato del frame | L'insieme dei parametri per i periodi CF, se la BSS trovata
supporta questa modalità |
| IBSS Parameter Set | Come definito nel formato del frame | Come definito nel formato del frame | L'insieme dei parametri per la IBSS, se la BSS trovata
è una WLAN ad hoc |
| Capability Information | Come definito nel formato del frame | Come definito nel formato del frame | Le capacità della BSS |
| BSSBasicRateSet | Insieme di interi | 2-127 (∀intero dell'insieme) | L'insieme dei data rate (in
unità da 500 kb/s) che devono essere supportati da tutte le STA che
vogliono aggiungersi a questa BSS. La STA dev'essere in grado di ricevere
usando ciascuno dei data rate elencati nella lista |
Table 4.14: Elemento BSSDescription
* Primitiva MLME-JOIN.Confirm
Questa primitiva conferma l'avvenuta sincronizzazione con una BSS.
Questa primitiva richiede i seguenti parametri:
| Nome | Tipo | Valori possibili | Descrizione |
| ResultCode | Enumeration | SUCCESS, INVALID_PARAMETERS | Indica il risultato della primitiva MLME-JOIN.Request |
Table 4.15: Parametri della primitiva MLME-JOIN.Confirm
La topologia con infrastruttura consente l'implementazione di un sistema
per la gestione delle transizioni delle stazioni mobili da una BSS
ad un altra (roaming). Lo standard fornisce come supporto la procedura
di Riassociazione. Quando un terminale mobile IEEE 802.11 decide di
spostarsi da una BSS ad un'altra nelle vicinanze, tipicamente per
migliorare le condizioni di ricezione come avviene nelle reti cellulari,
compie una procedura di scan, come visto a pagina
pageref,
alla fine della quale possiede una lista di AP che può ordinare ad
esempio in base alla qualità del segnale. Una volta scelto l'AP verso
cui ha deciso di spostarsi, invia una richiesta (un frame Reassociation
Request) verso questo AP. Il frame Reassociation Request contiene
anche l'indirizzo MAC dell'AP cui la stazione è correntemente associata.
Successivamente, l'AP prescelto invia alla stazione un frame Reassociation
Response, comunicandole l'esito della procedura.
Possiamo osservare che:
- lo standard specifica che l'AP verso cui una stazione si è spostata,
riassociandosi, deve comunicare al sistema di distribuzione l'avvenuta
riassociazione, cosicchè il sistema di distribuzione può sempre univocamente
determinare un AP che serve la stazione che si è spostata da una BSS
ad un'altra. In pratica deve avvenire uno scambio d'informazioni tra
i due AP coinvolti nell'operazione di roaming. Tutto questo non fa
comunque parte dello standard, cosicchè sono stati sviluppate molte
soluzioni proprietarie. Vi è comunque un particolare Task Group (IEEE
802.11f) all'interno dell'organizzazione IEEE che sta studiando un
protocollo, al momento in fase di bozza, detto IAPP (inter access
point protocol) per standardizzare questa procedura.
4.8 Formato dei pacchetti
Ciascun pacchetto MAC (o frame come lo abbiamo chiamato finora), è
composto dai seguenti componenti base:
- MAC Header: che comprende informazioni di controllo, informazioni
sugli indirizzi mittente e destinatario etc.
- Frame Body: di lunghezza variabile, contiene informazioni relative
al tipo di frame specificato nell'header (ad esempio, se il
frame è di tipo dati il frame body conterrà i dati stessi, ovvero
il payload).
- Frame Check Sequence (FCS): è il CRC a 32 bit usato per rilevare
gli errori di ricezione.
4.8.1 Formato generale dei frame
La figura
4.24 illustra il formato
dei frame MAC del protocollo IEEE 802.11:
Figure 4.24: Formato generale del frame MAC
I campi: Address 1, Address 2, Address 3, Sequence
Control, Address 4 e Frame Body sono presenti solo
in alcuni tipi di frame.
4.8.2 Descrizione dei campi
La figura
4.25, mostra il contenuto
del campo frame control incluso nell'header:
Figure 4.25: Formato del Frame Control Field
E' opportuno analizzare alcuni campi di maggiore importanza:
Campi Type e Subtype
Lo standard prevede 3 tipi di frame:
data,
control e
management. Ciascuno dei tipi ha a sua volta molti sottotipi
e questi possono essere riassunti nelle tabelle
4.16 e
4.17:
| Type (b3,b2) | Descrizione type | Subtype (b7,b6,b5,b4) | Descrizione subtype |
| 00 | management | 0000 | association request |
| 00 | management | 0001 | association response |
| 00 | management | 0010 | reassociation request |
| 00 | management | 0011 | reassociation response |
| 00 | management | 0100 | probe request |
| 00 | management | 0101 | probe response |
| 00 | management | 0110-0111 | riservati |
| 00 | management | 1000 | beacon |
| 00 | management | 1001 | ATIM |
| 00 | management | 1010 | disassociation |
| 00 | management | 1100 | deauthentication |
| 00 | management | 1101-1111 | riservati |
Table 4.16: Valori possibili dei campi Type e Subtype del frame control field
| Type (b3,b2) | Descrizione type | Subtype (b7,b6,b5,b4) | Descrizione subtype |
| 01 | control | 0000-0001 | riservati |
| 01 | control | 1010 | PS-Poll |
| 01 | control | 1011 | RTS |
| 01 | control | 1100 | CTS |
| 01 | control | 1101 | ACK |
| 01 | control | 1110 | CF-End |
| 01 | control | 1111 | CF-End+CF-ACK |
| 10 | data | 0000 | data |
| 10 | data | 0001 | data+CF-ACK |
| 10 | data | 0010 | data+CF-Poll |
| 10 | data | 0011 | data+CF-ACK+CF-Poll |
| 10 | data | 0100 | Null |
| 10 | data | 0101 | CF-ACK |
| 10 | data | 0110 | CF-Poll |
| 10 | data | 0111 | CF-ACK+CF-Poll |
| 10 | data | 1000-1111 | riservati |
Table 4.17: Valori possibili dei campi Type e Subtype del frame control field
(continua)
Campi ToDS e FromDS
Le diverse combinazioni dei campi ToDS e FromDS e i loro significati
possono essere riassunti nella seguente tabella:
| ToDS | FromDS | Significato |
| 0 | 0 | E' presente in un frame di tipo dati che va da una
STA ad un'altra nella stessa IBSS, ed è presente in tutti i frame
di tipo control e management |
| 0 | 1 | E' presente nei frame di tipo dati destinati al DS |
| 1 | 0 | E' presente nei frame di tipo dati provenienti dal
DS |
| 1 | 1 | E' presente nei frame che transitano da un AP ad un
altro Ap tramite il Wireless DS (WDS) |
Table 4.18: Combinazioni dei campi To/From DS nei frame di tipo dati
Campo More Fragments
Questo bit, se posto ad 1, indica che il frame corrente è una parte
(MPDU) di un messaggio (MSDU) che è stato frammentato a livello MAC,
e quindi seguiranno altri frammenti dello stesso messaggio. Il suo
valore è 0 in tutti gli altri casi.
Campo Retry
Il bit retry è posto a 1 se il frame corrente rappresenta una ritrasmissione
di un frame precedente. Questo è utile nella rilevazione dei frame
duplicati, come abbiamo visto in
66.
Campo WEP
Il bit WEP, se settato a 1, indica che il Frame Body (ovvero il payload)
contiene delle informazioni che sono state cifrate con l'algoritmo
WEP. Solo i frame del tipo Data e del tipo Management, sottotipo Authentication,
possono avere il bit WEP settato a 1, tutti gli altri frame hanno
tale bit settato a 0. Se il bit WEP è settato a 1, il frame body aumenta
di dimensione come si vede dalla figura
4.26:
Il processo di cifratura espande il frame body di 8 bytes.
Campo Duration/ID
Le dimensioni di questo campo sono 16 bit e il suo contenuto può essere
riassunto dalla tabella seguente:
| Bit 15 | Bit 14 | Bit 13-0 | Uso |
| 0 | 0-32767 | Durata |
| 1 | 0 | 0 | Valore fisso tra i frame trasmessi durante il CFP |
| 1 | 0 | 1-16383 | Riservato |
| 1 | 1 | 0 | Riservato |
| 1 | 1 | 1-2007 | AID per i frame di tipo PS-Poll |
| 1 | 1 | 2008-16383 | Riservato |
Table 4.19: Codifica dei bit del campo Duration/ID
Come già visto, il campo Duration/ID è usato per aggiornare il NAV
delle STA che accedono al mezzo secondo le regole del metodo DCF.
Nell'header dei pacchetti MAC IEEE 802.11 vi sono 4 campi dedicati
agli indirizzi, ciascuno dei quali contiene un indirizzo a 48 bit
conforme allo standard IEEE Std 802-1990. Un indirizzo MAC
può essere di 2 tipi:
- Indirizzo individuale. L'indirizzo associato ad una particolare STA
nella rete.
- Indirizzo di gruppo. Un indirizzo relativo a destinazioni multiple.
Anche qui abbiamo 2 sottotipi:
- Multicast. Un indirizzo associato, a livello superiore al MAC,
ad un gruppo di STA della rete.
- Broadcast. Un particolare indirizzo multicast che indirizza
tutte le STA appartenenti ad una specifica LAN. Quando i bit del campo
Destination Address sono tutti pari a 1, questa situazione viene interpretata
come un trasferimento broadcast.
I suddetti 4 campi dedicati agli indirizzi possono contenere una delle
seguenti indicazioni: BSSID (
BSS Identifier),
Destination
Address (DA),
Source Address (SA),
Trasmitter Address
(TA) e
Receiver Address (RA), sebbene alcuni frame possano
non contenere alcuni dei campi d'indirizzo.
In alcuni casi, l'uso di un particolare campo d' indirizzo è direttamente
collegato alla sua posizione (1-4) all'interno dell'header del frame
MAC. Ad esempio, quando una STA vuole confrontare il proprio indirizzo
con l'indirizzo destinazione di un frame, controlla sempre il contenuto
del campo Address 1, oppure l'indirizzo del ricevente (ovvero della
STA destinataria immediatamente successiva) dei frame CTS e ACK è
sempre ottenuta dal campo Address 2 nel corrispondente frame RTS o
nel frame che si sta confermando con l'ACK.
BSSID
Questo campo rappresenta un indirizzo a 48 bit avente lo stesso formato
degli indirizzi MAC IEEE 802, che identifica univocamente ciascuna
BSS. Se quest'ultima possiede un'infrastruttura, ovvero è presente
l'AP, il campo BSSID rappresenta l'indirizzo MAC della STA in cui
risiede l'AP.
In una IBSS, quest'indirizzo viene generato casualmente.
Il valore pari a tutti 1 del campo BSSID, rappresenta una situazione
di broadcast per tutte le BSS. Può essere usato solo nei frame di
tipo
probe request (vedi
4.7).
Destination address (DA)
Il campo DA contiene un indirizzo MAC (individuale o di gruppo) che
identifica la (o le) entità MAC intese come destinataria (o destinatarie)
finale della MSDU (o del singolo frammento MPDU) contenuto nel frame
body.
Source Address (SA)
Il campo SA contiene un indirizzo MAC individuale che identifica l'entità
MAC dalla quale ha avuto origine la trsmissione della MSDU (o MPDU).
Receiver Address (RA)
Il campo RA contiene un indirizzo MAC (individuale o di gruppo) che
identifica l'entità (o le entità) MAC che, relativamente al WM (Wireless
Medium), sarà l'immediata destinataria del frame body corrente.
Trasmitter Address (TA)
Il campo TA contiene un indirizzo MAC individuale che identifica la
STA che ha trasmesso, relativamente al WM, la MPDU contenuta nel frame
body.
Campo Sequence control
Il campo Sequence Control è costituito da 16 bit: 12 bit di
Sequence Number e 4 bit di Fragment Number.
Il campo sequence number contiene il numero di sequenza di una MSDU
o di una MMPDU. Ad ogni MSDU o MMPDU trasmessa da una STA viene assegnato
un sequence number, tramite un contatore modulo 4096, che parte da
1 e viene incrementato di uno per ogni MSDU o MMPDU. Ciascun frammento
della stessa MSDU o MMPDU contiene lo stesso sequence number che è
stato assegnato a quella MSDU o MMPDU. Il sequence number rimane invariato
per tutte le ritrasmissioni della MSDU o MMPDU oppure di uno dei loro
frammenti.
Il campo fragment number indica il singolo frammento di una MSDU o
MMPDU. Tale campo è 0 per il primo frammento di una MSDU o MMPDU e
viene incrementato di uno per ogni frammento trasmesso. Rimane tuttavia
costante durante le ritrasmissioni di uno stesso frammento.
Campo FCS
Questo campo contiene un codice CRC (Cyclic Redundancy Check)
a 32 bit, calcolato su tutti i campi dell'header e del frame body.
Il polinomio generatore del FCS è:
|
G(x)=x32+x26+x23+x22+x16+x12+x11+x10+x8+x7+x5+x4+x2+x+1 |
|
4.8.3 Descrizione di alcuni frame importanti
E' utile, a titolo di esempio, riportare la composizione di alcuni
frame che abbiamo visto essere importanti per il corretto funzionamento
di una WLAN IEEE 802.11
Composizione dei frame di tipo dati
La composizione di un frame di tipo dati non dipende non varia a seconda
dei sottotipi, ed è definito dalla figura
4.27:
Figure 4.27: Composizione del frame di tipo dati
Il contenuto dei campi d'indirizzo dipende dai valori dei campi ToDS
e FromDS, come si vede dalla tabella
4.20,
e ricordando che i valori ToDS e FromDS possono essere interpretati
come da tabella
4.18:
| ToDs | FromDS | Address 1 | Address 2 | Address 3 | Address 4 |
| 0 | 0 | DA | SA | BSSID | N/A |
| 0 | 1 | DA | BSSID | SA | N/A |
| 1 | 0 | BSSID | SA | DA | N/A |
| 1 | 1 | RA | TA | DA | SA |
Table 4.20: Relazione tra To/From DS e i campi Address in un frame dati
Quando il contenuto del campo è N/A, il campo stesso è omesso. Il
campo Address 1 contiene sempre l'indirizzo MAC del destinatario del
frame, mentre il campo Address 2 contiene sempre l'indirizzo MAC della
STA che sta trasmettendo il frame.
Una STA usa in contenuto del campo Address 1 per capire se il frame
è ad essa indirizzato. Nel caso in cui il campo Address 1 contenga
un indirizzo di gruppo (multicast o broadcast), viene esaminato anche
il valore BSSID
77 per capire se il frame multicast o broadcast ha avuto origine nella
stessa BSS della STA ricevente.
Una STA usa il contenuto del campo Address 2 per indirizzare il frame
ACK, quando richiesto.
RA è l'indirizzo MAC del'AP che nel sistema di distribuzione wireless
è l'immediato destinatario del frame, o del frammento. TA invece è
l'indirizzo MAC dell'AP che, sempre nel sistema di distribuzione wireless,
è l'immediato mittente del frame o del frammento.
Il valore BSSID viene così interpretato:
- se la WLAN è di tipo ``con infrastruttura'', il BSSID coincide
con l'indirizzo MAC della STA IEEE 802.11 che funziona da AP;
- se la WLAN è una rete ad hoc (IBSS), il BSSID è l'identificativo della
IBSS (scelto casualmente).
Il frame body consiste nell'MSDU (o in un suo frammento MPDU) più
i campi aggiunti dal WEP nel caso sia stata attivata quest'opzione.
Il frame body è nullo nei frame Null, CF-ACK, CF-Poll, e CF-ACK+CF-Poll.
Il campo Duration viene inizializzato come segue:
- Per tutti i frame inviati durante il CFP, viene impostato al valore
32768
- Per i frame inviati durante il CP:
- Se il campo Address 1 contiene un indirizzo di gruppo, il campo Duration
viene azzerato.
- Se il campo More Fragments è 0 nel Frame Control Field e il campo
Address 1 contiene un indirizzo individuale, nel campo Duration viene
scritta la durata, in microsecondi, necessaria per trasmettere un
frame ACK più un intervallo SIFS78.
- Se il campo More Fragments è settato a 1 nel Frame Control Field (dunque
si tratta di un frammento di MSDU) e il campo Address 1 contiene un
indirizzo individuale, nel campo Duration viene scritta la durata,
in microsecondi, necessaria a trasmettere il successivo frammenti
delle MSDU in questione più 2 frame ACK più 3 intervalli SIFS.
Composizione generale dei frame di tipo Management
Anche la composizione dei frame di tipo Management non varia a seconda
dei diversi sottotipi. Possiamo osservare tale composizione in figura
4.28:
Figure 4.28: Composizione dei frame di tipo management
Il frame body è composto in parte da campi di dimensione fissata,
ed in parte da elementi informativi, ovvero raggruppamenti
di più dati che possono avere dimensione variabile. Alcuni campi o
elementi informativi sono obbligatori ed è obbligatorio anche l'ordine
in cui devono comparire all'interno del frame body.
4.9 Livello fisico (PHY) del protocollo IEEE 802.11
Lo standard IEEE 802.11, prevede 3 diverse implementazioni del livello
fisico che consente il trasporto delle informazioni tra le STA di
una WLAN compatibili:
- IR Infrarosso
- FHSS Frequency Hopping Spread Spectrum (Radiofrequenza)
- DSSS Direct Sequence Spread Spectrum (Radiofrequenza)
Il livello PHY è costituito dalle seguenti 2 funzioni:
- PLCP (Physical Layer Convergence Function) che, grazie alla
procedura PLCP (Physical Layer Convergence Procedure), mappa
le MPDU IEEE 802.11 (Mac Protocol Data Unit) in frame dal formato
compatibile con il sistema PMD (vedi a seguito) ed in generale semplifica
l'interfaccia tra il MAC ed il livello PHY.
- PMD (Physical Medium Dependent) è un sistema che definisce
le caratteristiche di un mezzo trasmissivo wireless (WM) e definisce
i metodi per trasmettere e ricevere dati attraverso tale mezzo trasmissivo,
oltre a fornire funzioni CCA (Clear Channel Assessment).
Nelle sezioni successive analizziamo le implementazioni FHSS e DSSS,
poichè sono le più usate nei dispositivi commerciali.
Abbiamo già visto nell'Introduzione i principi generali di
un sistema di trasmissione a RF (Radiofrequenza) che adotti la tecnica
denominata Frequency Hopping.
Le caratteristiche del PHY FHSS specificato dallo standard IEEE 802.11
sono esaminate di seguito.
Bande operative
Il PHY IEEE 802.11 FHSS è stato definito per operare nella banda ISM
2.4 GHz. Per le normative europee si veda la tabella (RIF a quella
dell'introduzione anche se andrebbe rifatta come da tabella pag 123
dello standard).
L'intervallo di frequenze utilizzabile dai dispositivi che usano questo
PHY è specificato, relativamente alla posizione geografica, nella
seguente tabella:
| Limite inferiore (GHz) | Limite superiore (GHz) | Intervallo (GHz) | Area geografica | # di canali |
| 2.402 | 2.480 | 2.400-2.4835 | Nord America | 79 |
| 2.402 | 2.480 | 2.400-2.4835 | Europa (tranne Francia e Spagna) | 79 |
| 2.473 | 2.495 | 2.471-2.497 | Giappone | 23 |
| 2.447 | 2.473 | 2.445-2.475 | Spagna | 27 |
| 2.448 | 2.482 | 2.4465-2.4835 | Francia | 35 |
Table 4.21: Bande operative IEEE 802.11 FHSS
Come si vede dalla tabella
4.21, in Europa (escluse
Francia e Spagna) sono definite 79 canali di hop, non sovrapposti
e spaziati di 1 MHz.
Livelli di potenza di emissione
In Europa, il limite imposto alla potenza di trasmissione dei dispositivi
IEEE 802.11 è 100 mW EIRP
79. Lo standard impone inoltre che tutti i dispositivi realizzati in
conformità con esso debbano supportare almeno un livello di potenza
trasmessa pari a 10 mw EIRP.
Nel caso in cui si realizzasse un dispositivo conforme allo standard,
ma con la capacità di trasmettere segnali di potenza maggiore di 100
mW EIRP, dev'essere implementato un meccanismo di controllo della
potenza di trasmissione che operi in modo da ridurre la potenza del
segnale trasmesso ad un livello minore o uguale a 100 mW, quando necessario.
Modulazione del segnale
La trasmissione del segnale avviene usando la modulazione GFSK (Gaussian
shaped Frequency Shift Keying) con un prodotto BT (bandwitdh-time)
pari a 0.5; in particolare:
* 2-GFSK
Questa modulazione prevede che il simbolo 1 venga codificato con una
deviazione positiva (+fd), rispetto alla portante Fc,
mentre prevede che il simbolo 0 venga codificato con una deviazione
negativa (−fd), rispetto alla portante. La velocità di segnalazione
(Fclk) è pari ad 1 Msimbolo/s, cosicchè otteniamo una velocità
di trasferimento (data-rate) pari a 1 Mbit/s. Il fattore di
deviazione h2 (definito come la differenza tra le frequenze
al centro delle sequenze 0000 e 1111 diviso per 1 MHz), è 0.32. Quindi
si ha:
| 1 Mbit/s, 2GFSK |
| Simbolo | Deviazione dalla portante |
| 1 | [ 1/2]·h2·Fclk=160 KHz |
| 0 | −[ 1/2]·h2·Fclk |
Table 4.22: Codifica dei simboli 2GFSK
* 4-GFSK
Questa modulazione prevede la seguente codifica:
| 2 Mbit/s, 4GFSK |
| Simbolo | Deviazione dalla portante |
| 10 | [ 3/2]·h4·Fclk=216 KHz |
| 11 | [ 1/2]·h4·Fclk=72 KHz |
| 01 | −[ 1/2]·h4·Fclk |
| 00 | −[ 3/2]·h4·Fclk |
Table 4.23: Codifica dei simboli 4GFSK
Ove h4=0.45×h2=0.144. Questa codifica consente di raddoppiare
il data rate: la velocità di segnalazione è sempre 1 Msimbolo/s ,
ma ogni simbolo codifica 2 bit di informazione e quindi otteniamo
un data rate di 2Mbit/s.
Figure 4.29: Modulazioni usate dal livello fisico FHSS
Generazione delle sequenze di hopping
Facciamo in seguito riferimento a sistemi che possiedono 79 canali
di hop (USA e Europa tranne Francia e Spagna). Ogni singola entità
PMD (ovvero ogni STA) genera una sequenza pseudocasuale composta da
79 hop. Sono previste 78 diverse sequenze, organizzate in 3 insiemi
da 26 sequenze ciascuno. L'algoritmo di generazione assicura una distanza
minima di 6 canali tra due hop consecutivi. I 3 insiemi da 26 sequenze
sono stati pensati per facilitare l'allocazione di più reti nella
stessa area; il rischio di collisioni tra pacchetti trasmessi da STA
che operano in reti WLAN che usano sequenze di hopping appartenenti
a insiemi diversi è minimo, e alcuni test indicano che il throughput
non degrada sensibilmente anche se si collocano fino a 15 diverse
reti nella stessa area.
Definiamo Fx lo schema composto dalle 79 frequenze di hop per
una specifica WLAN (o BSS, ovviamente tutte le STA della WLAN adottano
lo stesso schema Fx).
|
Fx={ fx(1),fx(2),...,fx(p)} |
|
ove:
- fx(i) è il numero del canale per la i-esima frequenza dell'x-esimo
schema di hopping
- p è il numero dei canali disponibili (nel nostro caso p=79)
La frequenza
fx(
i) viene calcolata così:
ove b(i) rappresenta l'i-esimo elemento della cosiddetta base
hopping sequence, definita, sempre nel caso dei sistemi con 79 hop,
dalla seguente tabella:
Figure 4.30: Base hopping sequence per USA e Europa (tranne Francia e Spagna)
Come abbiamo già detto, sono definiti nello standard 78 schemi (o
sequenze) di hopping, ovvero 78 permutazioni delle 79 frequenze disponibili,
organizzati in 3 insiemi da 26 schemi ciascuno. Questi insiemi sono:
- x={ 0,3,6,9,12,15,18,21,24,27,30,33,36,39,42,45,48,51,54,57,60,63,66,69,72,75}
- x={ 1,4,7,10,13,16,19,22,25,28,31,34,37,40,43,46,49,52,55,58,61,64,67,70,73,76}
- x={ 2,5,8,11,14,17,20,23,26,29,32,35,38,41,44,47,50,53,56,59,62,65,68,71,74,77}
Facciamo un esempio per chiarire meglio: supponiamo che una STA operi
in una WLAN che adotta lo schema 33 che appartiene al set 1, mentre
un altra STA operi in un'altra WLAN collocata nella stessa area della
prima WLAN ma adottando lo schema 71, che appartiene al set 3. Allora
gli hop della prima STA saranno definiti dalla relazione:
|
F33={ f33(1),f33(2),...,f33(79)} |
|
e
|
f33(1)=[b(1)+33]mod (79)+2=0+33+2=35⇒2.435 GHz |
|
|
f33(2)=[b(2)+33]mod (79)+2=23+33+2=58⇒2.458 GHz |
|
e cosi via. Come si vede, tra gli hop 1 e 2 vi è una distanza di 23
MHz, e questo è utile per ridurre la possibilità di collisioni successive:
se il canale 1 (f=2.435 GHz) risultasse disturbato ed il pacchetto
trasmesso utilizzando quella frequenza non venisse inviato o ricevuto
correttamente, la successiva ritrasmissione avvererebbe sul canale
2 (f=2.458 GHz) che dista dal primo 23 MHz e, presumibilmente, non
è coinvolto nei disturbi che agivano sul canale 1. Allo stesso tempo,
osserviamo la sequenza generata per la seconda WLAN, sovrapposta geograficamente
alla prima, ma che utilizza lo schema 71 del set 3:
|
F71={ f71(1),f71(2),...,f71(79)} |
|
e
|
f71(1)=[b(1)+71]mod (79)+2=0+71+2=73⇒2.473 GHz |
|
|
f71(2)=[b(2)+71]mod (79)+2=15+2=17⇒2.417 GHz |
|
e cosi via. Come si vede, vale lo stesso discorso fatto per la prima
WLAN per quel che riguarda le interferenze sui singoli canali; inoltre
le frequenze che fanno parte dello schema scelto dalla seconda WLAN
saranno per la maggior parte differenti da quelle che fanno parte
dello schema scelto dalla prima WLAN, cosicchè si minimizza il rischio
di collisione tra i pacchetti delle diverse WLAN.
Hop Rate
L'hop rate, ovvero la frequenza con la quale viene cambiato
il canale di hop è 2.5 hop/s (quindi la frequenza operativa cambia
ogni 400 ms).
Formato dei pacchetti PLCP
Il formato dei pacchetti PLCP è descritto dalla figura seguente:
Figure 4.31: FHSS: formato dei pacchetti PLCP
Il PLCP Preamble viene trasmesso sempre a 1Mbps e dev'essere
completato in 96μs. Contiene delle informazioni utili per la
compensazione dell'offset di frequenza, l'aggiustamento del guadagno,
selezione dell'antenna. Il campo SFD (start frame delimiter)
è una sequenza prefissata di bit che segnala l'inizio vero e proprio
del frame. Il PLCP Header viene trasmesso sempre a 1 Mbps e
dev'essere completato in 32μs. PLW specifica il numero di byte
contenuti nella PSDU, mentre PSF specifica il data rate utilizzato
per trasmettere la PSDU.
Ancora una volta, possiamo far riferimento a quanto visto nell'Introduzione
per quello che riguarda l'implementazione Direct Sequence della tecnica
Spread Spectrum. Le caratteristiche del PHY DSSS dello standard IEEE
802.11 sono esaminate nel seguito.
Bande operative
Il PHY IEEE 802.11 DSSS è stato definito per operare nella banda ISM
2.4 GHz
80. Per le normative europee si veda la tabella (RIF a quella dell'introduzione
anche se andrebbe rifatta come da tabella pag 123 dello standard).
La tabella seguente riporta le frequenze centrali e gli identificativi
(CHNL_ID) dei canali disponibili:
Figure 4.32: Canali disponibili IEEE 802.11 DSSS
Ogni canale ha un'ampiezza di 22 MHz
81. Nel caso in cui si vogliano allocare nella stessa area più WLAN,
per limitare l'interferenza reciproca, è necessario che le frequenze
centrali dei canali di ogni WLAN siano spaziate di almeno 25 MHz.
Codifica
Il PHY DSSS dello standard IEEE 802.11 usa, per codificare il flusso
informativo, una particolare sequenza di Barker composta da
11 simboli (cosiddetti chip). La sequenza scelta è:
|
+1,−1,+1,+1,−1,+1,+1,+1,−1,−1,−1 |
|
Figure 4.33: Sequenza di Barker per IEEE 802.11 DSSS
Le sequenze di Barker
82 possiedono buone proprietà di
correlazione aperiodica, che
significa semplicemente che, a causa del comportamento non ripetitivo
del codice di Barker, un filtro a comparazione può facilmente riconoscere
il codice di Barker in una sequenza di bit.
Modulazioni e data rate
Lo standard specifica 2 modulazioni e 2 data rate associati alle modulazioni
stesse, per il PHY DSSS: un basic access rate, basato sulla
modulazione DBPSK (Differential Binary Phase Shift Keying),
ed un enhanced access rate, basato sulla modulazione QBPSK
(Quadrature Binary Phase Shift Keying).
| Bit in ingresso | Modifica alla fase (+jω) |
| 0 | 0 |
| 1 | π |
Table 4.24: Modulazione DBPSK
| Sequenza di 2 bit d0, d1 (d0 primo nel tempo) | Modifica alla fase (+jω) |
| 00 | 0 |
| 01 | [ π/2] |
| 11 | π |
| 10 | [ 3/2]·π |
Table 4.25: Modulazione QBPSK
La velocità di modulazione è pari a 1Msimbolo/s. Un simbolo è composto
dagli 11 chips della sequenza di Barker vista. Se si sceglie la modulazione
DBPSK, si ottiene un data rate pari a 1 Mb/s, poichè ogni simbolo
codifica 1 bit d'informazione. Se invece si sceglie la modulazione
QBPSK, si ottiene un data rate di 2 Mb/s, poichè ogni simbolo codifica
2 bit d'informazione.
Spettro del segnale modulato
Figure 4.34: DSSS: spettro del segnale modulato
La figura
4.34 mostra lo spettro del segnale DSSS
prima e dopo lo spreading.
Si noti che lo spettro ha la forma di un inviluppo dall'espressione:
La modulazione (ovvero la somma modulo 2 del segnale in banda base
e della sequenza di barker), effettivamente espande il segnale su
una banda più ampia. Il lobo principale della figura
4.34
è una funzione della forma d'onda modulante e della velocità di chipping.
Una regola comunemente usata nei sistemi DSSS consiste nel fissare
la banda
null to null 83 al doppio del valore della velocità di chipping. Usando quindi una
sequenza di Barker a 11 chip, con un
chip rate di 11 Mcps (mega
chip per second), la banda null to null del segnale espanso risulta
22MHz. Questo consente di allocare nella banda ISM 2.4 GHz fino a
3 canali DSSS non sovrapposti.
Figure 4.35: DSSS: canali non sovrapposti nella banda ISM
Formato dei pacchetti PLCP
Il formato dei pacchetti PLCP è descritto dalla figura seguente:
Figure 4.36: DSSS: formato dei pacchetti PLCP
Sia il PLCP Preamble che il PLCP Header devono essere trasmessi a
1Mbps.
4.9.3 IEEE 802.11 Hi-Rate DSSS
Nel 1998, Lucent Technologies e Harris Semiconductor
(ora parte della Intersil Corp.) proposero all'istituto IEEE
l'inserimento nello standard della tecnica di codifica CCK (Complementary
Code Keying), la quale, utilizzata per effettuare lo spreading dei
segnali nell'implementazione PHY DSSS al posto della sequenza di Barker,
consentiva di raggiungere velocità di trasferimento dei dati di 5.5
Mbps e 11 Mbps. L'istituto IEEE accettò tale proposta e, nel 1999,
venne rilasciata la specifica IEEE 802.11b, che non prevede modifiche
al livello MAC, ma introduce sostanziali novità per l'implementazione
DSSS del livello PHY.
CCK
I codici CCK usati nello standard IEEE 802.11b per effettuare lo spreading
dei segnali per il PHY DSSS, appartengono alla classe dei polyphase
complementary codes, hanno una lunghezza di 8 chip e un chipping
rate di 11Mchip/s. Quindi un simbolo è rappresentato da 8
chip complessi. Usando una velocità di segnalazione di 1.375 MSimboli/s
(contro gli 1 MSimboli/s dello standard IEEE 802.11), il segnale a
11Mbps ottenuto occuperà la stessa banda del segnale a 2Mbps dello
standard IEEE 802.11, consentendo quindi l'allocazione di 3 canali
non sovrapposti nella banda ISM.
La code word CCK da 8 chip viene ottenuta dalla formula seguente:
c={ ej(ϕ1+ϕ2+ϕ3+ϕ4),ej(ϕ1+ϕ3+ϕ4),ej(ϕ1+ϕ2+ϕ4),
|
−ej(ϕ1+ϕ4),ej(ϕ1+ϕ2+ϕ3),ej(ϕ1+ϕ2+ϕ3+ϕ4),−ej(ϕ1+ϕ2),ejϕ1} |
|
Con questa formula quindi si generano i codici CCK usati per ottenere
data rate di 11Mbps e 5.5Mbps
84. Scegliendo il data rate 11Mbps, gli 8 codici generati (un simbolo
quindi) codificano 8 bit d'informazione, mentre per il data rate 5.5Mbps
vengono trasmessi 4 bit per simbolo e quindi gli 8 codici generati
codificano 4 bit d'informazione. Facciamo un esempi o riferendoci
al data rate 11Mbps. Il flusso informativo viene partizionato in byte
(d7,d6,d5, ...,d0), ove d0 è il LSB ed il primo bit in ordine di tempo.
Questi 8 bit vengono usati per generare i parametri di fase ϕ
1−ϕ
4,
come si può vedere dalla tabella seguente:
| DIBIT | Parametro di fase |
| (d0,d1) | ϕ1 |
| (d3,d2) | ϕ2 |
| (d5,d4) | ϕ3 |
| (d7,d6) | ϕ4 |
Table 4.26: Schema per la generazione dei parametri di fase
La codifica si basa sulla modulazione DQPSK (
differential quadrature
phase shift keying), che può essere visualizzata nella seguente tabella:
| DIBIT (di+i,di,) | Fase |
| 00 | 0 |
| 01 | π |
| 10 | [ π/2] |
| 11 | −[ π/2] |
Table 4.27: Modulazione QPSK dei parametri di fase
Ad esempio, se il flusso dei dati fosse d7,d6,d5, ...,d0=10110101,
dalle tabelle
4.26 e
4.27,
si ha che: d1,d0=01 e così ϕ
1=π, d3,d3=01 e così ϕ
2=π,
d5,d4=11 e così ϕ
3=−π/2 ed infine d7,d6=10 e così ϕ
4=π/2.
Riportando tali valori nella formula di c si ha:
avendo applicato anche la formula di Eulero ejθ=cosθ+j·sinθ.
Nonostante queste modifiche, lo standard IEEE 802.11b prevede comunque
l'utilizzo della tecnica di spreading DSSS che utilizza la sequenza
di Barker a 11 chip che abbiamo già visto in
4.9.2,
cosicchè i dispositivi realizzati secondo lo standard IEEE 802.11b
sono compatibili e quindi possono comunicare con quelli realizzati
secondo lo standard IEEE 802.11.
Bande operative
Non sono state specificate modifiche alle frequenze centrali che caratterizzano
i canali disponibili per la realizzazione di WLAN IEEE 802.11b. Nello
standard IEEE 802.11b tuttavia, è stata aumentata a 30 MHz (contro
i 25 MHz dello standard IEEE 802.11) la distanza minima tra due canali
consecutivi qualora si dovesse utilizzare tali canali per allocare
due diverse WLAN nella stessa area. Questo permette ancora di allocare
fino a 3 WLAN con canali operativi non sovrapposti nella banda ISM
2.4GHz.
In Europa (tranne per Francia e Spagna) abbiamo le seguenti possibilità
85:
| Set | Numero di canali | Numero del canale |
| 1 | 3 | 1,7,13 |
| 2 | 7 | 1,3,5,7,9,11,13 |
Table 4.28: IEEE802.11b: canali operativi in Europa (tranne Francia e Spagna)
Figure 4.37: IEEE802.11b: canali non sovrapposti
Figure 4.38: IEEE802.11b: canali sovrapposti
Formato dei pacchetti PLCP
Lo standard specifica due diversi tipi di PLCP Preamble e PLCP Header:
- Long Preamble e Long Header, obbligatori e necessari
per l'interoperabilità con i dispositivi realizzati secondo lo standard
IEEE 802.11
- Short Preamble e Short Header, opzionali.
Figure 4.39: IEEE802.11b: formato dei pacchetti PLCP con Long Preamble e Header
Figure 4.40: IEEE802.11b: formato dei pacchetti PLCP con Short Preamble e Header
L'utilizzo dello Short Preamble e dello Short Header è utile per ridurre
l'overhead e quindi migliorare il throughput totale della rete. Lo
Short Preamble viene trasmesso usando la modulazione DBPSK e la solita
sequenza di Barker per lo spreading a 1Mbps. Lo Short Header viene
trasmesso usando la modulazione DQPSK e la solita sequenza di Barker
a 2Mbps. La PSDU viene trasmessa a 2, 5.5 oppure 11 Mbps.
Part 2
Confronto tra i protocolli IEEE802.11 e Bluetooth
Chapter 5
Confronto tra i protocolli a livello MAC
Bluetooth e IEEE 802.11 sono due protocolli che definiscono un livello
fisico e un livello MAC (Media Access Control) per comunicazioni wireless
a breve raggio (da pochi metri a 100 m) e a basso consumo di potenza
(da meno di un mW a 100 mW). Bluetooth è orientato a connessioni fra
dispositivi vicini, come sostituto dei cavi per trasporto dati, mentre
IEEE 802.11 è orientato a connessioni fra computer, come estesione
o sostituto delle LAN cablate. In questo capitolo ci proponiamo di
confrontare le caratteristiche principali di questi due protocolli.
Analizziamo ora le prestazioni dei protocolli Bluetooth, IEEE 802.11
e la sua evoluzione IEEE 802.11b, relativamente alla loro capacità
di creare delle reti operative ed efficienti. Si noti che, da questo
punto in poi, la sigla IEEE 802.11 è relativa a caratteristiche comuni
alla versione IEEE 802.11b, mentre verrà usata espressamente la sigla
IEEE 802.11b quando necessario. Inoltre, data l' irrilevante presenza
sul mercato di dispositivi IEEE 802.11 con implementazione Frequency
Hopping, faremo riferimento ai dispositivi IEEE 802.11 con implementazione
Direct Sequence e Hi-Rate Direct Sequence ovvero IEEE 802.11b. Verrà
esclusa dalla trattazione anche l' implementazione del livello fisico
IEEE 802.11 IR (infrarosso).
Se facciamo riferimento al ``blocco costruttivo di base'' della
topologia di rete per i due protocolli, ovvero la BSS (Basic Service
Set) per IEEE 802.11 e la Piconet per Bluetooth, osserviamo che la
capacità in termini di numero di dispositivi che possono appartenere
ad uno stesso blocco base è limitata ad 8 (1 Master e 7 Slave attivi)
per Bluetooth, mentre è virtualmente illimitata per IEEE 802.11. Per
estendere il numero degli appartenenti ad una piconet, in Bluetooth
si può sfruttare la modalità Park, che consente di ``parcheggiare''
degli slave dando loro la possibilità di entrare nella piconet se
il master lo consente. In ogni caso, questi slave in modalità park
non possono partecipare attivamente alla piconet, ovvero ricevere
e scambiare dati.
Entrambi i protocolli prevedono la possibilità di creare una struttura
di rete più complessa a partire dai singoli blocchi base:
- ESS (Extended Service Set) per IEEE 802.11: una ESS è costituita da
un certo numero di BSS interconnesse tramite un sistema di distribuzione
(DS), che può essere una rete LAN cablata oppure un sistema wireless,
anche un altro sistema IEEE 802.11. Le stazioni wireless possono essere
mobili e spostarsi da una BSS ad un altra, all'interno della stessa
ESS, mantenendo la connessione alla rete. Il sistema di distribuzione
si occupa del trasporto dei dati tra BSS diverse. In ogni BSS vi sarà
una particolare stazione delegata a tenere i contatti con il DS: se
la BSS è di tipo ``con infrastruttura'' tale stazione verrà indicata
con il nome di Access Point (AP).
- Scatternet per Bluetooth: un certo numero di piconet Bluetooth possono
essere connesse a formare una scatternet. Un dispositivo Bluetooth
può agire da slave in più di una piconet, cambiando i propri parametri
relativi alla sequenza di hopping e dividendo il proprio tempo di
operatività tra le piconet di cui fa parte, mentre può essere master
in una sola piconet per volta.
Introduciamo il concetto di
capacità spaziale, definita come
il rapporto tra la velocità di trasferimento dati aggregata e l' unità
di superficie; questo concetto è molto usato e si possono trovare
dei riferimenti in
http://www.ubiq.com/hypertext/weiser/NomadicInteractive
Possiamo quindi osservare che:
- Bluetooth, a fronte di una portata radio limitata a circa 10m, consente
di allocare in questo spazio fino a 10 diverse Piconet[6],
ognuna con una velocità di trasferimento dati di circa 700 kbps86.
- IEEE 802.11b, a fronte di una portata radio limitata a circa 100m,
consente di allocare in questo spazio fino a 3 diverse BSS in assenza
d'interferenze mutue, ognuna con una velocità di trasferimento di
circa 11Mbps87.
- E' opportuno osservare che, per quel che riguarda i sistemi che usano
la tecnica Frequency Hopping Spread Spectrum (FHSS), come Bluetooth
e IEEE 802.11 nella implementazione del livello fisico FHSS, un qualsiasi
limite all' allocazione nella stessa area di più reti wireless è più
pratico che teorico. Infatti, secondo le regole della tecnica Frequency
Hopping, ogni dispositivo di una rete trasmette e riceve seguendo
una specifica sequenza di canali radio, la sequenza di hopping appunto;
quindi il limite teorico all' allocazione di più reti nella stessa
area è da ricercarsi nell' algoritmo di generazione delle sequenze
di hopping, che, di solito permette la creazione di un gran numero
delle suddette sequenze.
Quindi la capacità spaziale del protocollo IEEE 802.11 (in questo
caso IEEE802.11b) è pari a circa 1000 [(
bits)/(
sec·
m2)],
contro i circa 22000 [(
bits)/(
sec·
m2)] realizzati dal
protocollo Bluetooth. Questa disparità è legata soprattutto al rapporto
1/100 tra le aree di copertura che abbiamo considerato per i due protocolli:
accade che il protocollo Bluetooth può allocare un maggior numero
di reti indipendenti (10 contro 3) in una area 100 volte più piccola
di quella considerata per il protocollo IEEE 802.11b e, similmente
a quanto accade nelle reti
cellulari, la somma delle capacità
aggregate delle singole reti aumenta.
5.1.2 Velocità di creazione delle reti
Un altro parametro significativo per il confronto tra i due protocolli
presi in esame è la velocità di creazione delle reti, ovvero
la velocità con la quale vengono stabilite le connessioni tra due
o più dispositivi appartenenti alla stessa piconet (per Bluetooth)
o alla stessa BSS (per IEEE 802.11).
* Il protocollo Bluetooth
mette a disposizione le procedure di Inquiry e Page, per la scoperta
dei dispositivi presenti nell'area d'azione e la creazione delle reti.
* Procedura di Inquiry
viene usata periodicamente da un dispositivo Bluetooth Master che
vuole scoprire gli indirizzi MAC di eventuali altri dispositivi Bluetooth
Slave che si trovino nel suo raggio d'azione.
Esiste la possibilità di realizzare dei dispositivi con indirizzi
MAC conosciuti a priori
88, per i quali non è necessaria la procedura di Inquiry. In questo
caso è sufficiente la procedura di Page per creare la piconet e quindi
stabilire le connessioni.
* Procedura di Page
La procedura di Page viene usata da un dispositivo Bluetooth Master
per inserire uno specifico dispositivo Slave nella piconet, sfruttando
le informazioni sugli indirizzi MAC e sui clock delle unità, raccolte
durante la procedura di Inquiry o comunque già noti.
Per creare una piconet con il massimo numero di dispositivi ammissibili,
nell' ipotesi di assenza di interferenze esterne alla rete, è necessario
un tempo medio di circa 5 secondi per la fase di Inquiry più circa
altri 0.64 secondi per ognuna delle fasi di page (una per ognuno dei
sette slave).
* Il protocollo IEEE 802.11
prevede le procedure di Scan, Autenticazione e Associazione.
La procedura di Scan può essere effettuata in modalità Passiva o Attiva,
e serve a conoscere gli indirizzi MAC ed altri parametri relativi
alla sincronizzazione corrispondenti a stazioni IEEE 802.11 che si
trovano nel raggio d'azione del terminale.
Il tempo medio di scoperta dei dispositivi con la modalità di scan
passivo è pari a 50ms moltiplicato per il numero di canali che
si intende osservare. Il valore 50ms rappresenta la metà del valore
tipicamente assegnato al parametro BeaconPeriod (valore minimo: 1
Time Unit=1024μs). Secondo questa modalità infatti, la stazione
si mette in ascolto su un certo numero di canali, tra quelli previsti
dalle regolamentazioni nazionali, in attesa di ricevere dei frame
di tipo Beacon. Tale frame viene trasmesso periodicamente dall' AP
se è presente una rete con infrastruttura, mentre viene trasmesso
periodicamente da una stazione eletta con uno schema distribuito se
è presente una rete ad hoc (Indipendent Basic Service Set o IBSS).
Usando la procedura di scan attivo invece, la stazione deve prima
guadagnare l'accesso al mezzo secondo il metodo CSMA/CA per inviare
un frame di tipo Probe Request, dopodichè deve attendere l'accesso
al mezzo e l'invio del frame Probe Response dalle stazioni che hanno
ricevuto il Probe Request. In questo caso, il tempo di scoperta minimo,
in assenza di interferenze esterne alla rete e considerando una rete
lontana dalla saturazione, è pari al tempo necessario a trasmettere
un frame Probe Request, più un intervallo DIFS (DCF Inter-Frame
Space), più il tempo necessario a trasmettere un frame Probe Response,
il totale moltiplicato per il numero di canali che si vuole osservare.
Possiamo riassumere i suddetti tempi nella tabella seguente:
| Standard | Tempo (per un singolo canale) |
| IEEE 802.11 DS 1Mbps | 3ms |
| IEEE 802.11b DS 11Mbps | 450μs |
Table 5.1: Tempi di scoperta dei dispositivi IEEE 802.11 con scan attivo
Se stiamo realizzando una rete ad hoc, la procedura di Scan è sufficiente.
Anche l'autenticazione tra due stazioni in modalità ad hoc può essere
effettuata ma non è richiesto esplicitamente dallo standard.
Se invece la stazione volesse aggiungersi ad una rete con infrastruttura,
una volta scoperto l'Access Point con la procedura di Scan, è richiesta
l'Autenticazione tra la stazione e L'Access Point (AP), cui segue
l'Associazione della stazione con l'Access Point. Una volta effettuata
l'associazione con l'AP, la stazione può comunicare con stazioni in
altre BSS di cui l'AP è a conoscenza (vedi
5.2),
può comunicare con il metodo Point Coordination Function (PCF) (vedi
5.4), può comunicare con stazioni fuori dalla sua portata
ma visibili all'AP.
* Procedura di Autenticazione
Può essere effettuata in due modi:
- Open System Authentication è il metodo che non prevede alcuna identificazione
della stazione. In pratica, una stazione che richiede l'autenticazione
con questo metodo, viene autenticata dalla stazione destinataria della
richiesta se essa ha scelto lo stesso metodo OSA come metodo d'autenticazione.
Questa procedura richiede lo scambio di due frame tra le stazioni
coinvolte.
- Shared Key Authentication prevede che una stazione venga autenticata
da un'altra stazione solo se la prima possiede la stessa chiave segreta
della seconda. La chiave segreta comune a più stazioni autenticate
tra loro dev'essere distribuita tramite un canale diverso da un canale
IEEE 802.11. L'utilizzo di questo metodo è possibile solo se le stazioni
implementano il protocollo WEP (Wired Equivalent Privacy). Questa
procedura prevede lo scambio di quattro frame fra le due stazioni
coinvolte.
* Procedura di Associazione
Prevede l'invio, sempre secondo le regole CSMA/CA, del frame Association
Request dalla stazione verso l'Access Point, il quale dovrà rispondere
con il frame Association Response. Ancora una volta, i tempi di questa
operazione di associazione sono quelli relativi all'invio di un frame
ed alla ricezione di una risposta: pertanto possono essere applicate
le stesse considerazioni e gli stessi risultati visti per la procedura
di scan attivo.
Riassumiamo nella tabella seguente quanto visto nella sezione
5.1:
| Bluetooth | IEEE 802.11 |
| Numero massimo di terminali della cella base | 8 dispositivi attivi, 255 in modalità park | illimitato, per una cella con topologia ad hoc; da
1 a 2007 dispositivi associati per rete con topologia con infrastruttura |
| Estensione della cella base | Scatternet | ESS |
| Capacità aggregata della cella base | ∼ 700 kbps | 11mbps |
| Procedure usate per la creazione delle reti | Inquiry, Page | Scan e Autenticazione per le reti ad hoc, più Associazione
per le reti con infrastruttura |
| Raggio della cella base | 10 m | 150-300 m |
| Capacità spaziale | ∼ 22000 [(bits)/(sec·m2)] | ∼ 1000 [(bits)/(sec·m2)] |
| Velocità media di creazione delle reti, in assenza
d'interferenze esterne e con reti non sature | 5s+n·1.28s (n=numero di slave da aggiungere
alla piconet da 1 a 7) | n·c·1350μs (c=numero di canali da osservare,
da 1 a 13; n=numero di stazioni che si associano tranne l'AP), in
caso di scan attivo e topologia con infrastruttura |
Table 5.2: Confronto IEEE 802.11 e Bluetooth: creazione delle reti
* Bluetooth
è uno standard per comunicazioni wireless a corto raggio e a basso
costo, che opera nella banda ISM 2.4 GHz. Due o più dispositivi Bluetooth
che condividono lo stesso canale trasmissivo
89 formano una
Piconet.
Figure 5.1: Topologia di una rete Bluetooth: piconet
All'interno di una piconet un dispositivo Bluetooth può assumere solo
uno dei due ruoli: Master o Slave. Ciascuna piconet può contenere
solo un master (e ce ne dev'essere sempre uno), fino a 7 slave attivi
contemporaneamente e fino a 255 in modalità Park. Un qualsiasi dispositivo
Bluetooth può divenire master in una piconet. La topologia piconet
non ha problemi di routing o di contesa per l'accesso al mezzo perchè
le comunicazioni vengono gestite dal master. D'altra parte però, due
slave non possono comunicare direttamente tra di loro.
Due o più piconet possono essere interconnesse a formare una cosiddetta
Scatternet.
Figure 5.2: Topologia di una rete Bluetooth: scatternet
La connessione tra due piconet è rappresentata da un dispositivo Bluetooth
membro di entrambe le piconet; lo standard prevede che un dispositivo
Bluetooth possa essere slave in più piconet, ma master in una sola
piconet. La partecipazione di un dispositivo in più piconet è gestita
dallo stesso dispositivo, secondo uno schema a divisione di tempo.
Il concetto di Scatternet è riconducibile al concetto di ``rete
wireless ad hoc multi hop''.
* IEEE802.11
Le specifiche IEEE 802.11 rappresentano uno standard per la realizzazione
di wireless LAN operanti nella banda ISM 2.4 GHz. Lo standard prevede
sia la comunicazione diretta (peer-to-peer) tra i terminali,
che la comunicazione tra i terminali e le base station dette
Access Point (AP).
* Topologia con infrastruttura
La configurazione tipica di una rete realizzata con dispositivi IEEE
802.11 è quella cosiddetta ``con infrastruttura''.
Figure 5.3: Topologia con infrastruttura e definizione di ESS
Si possono identificare delle celle base, dette BSS (Basic Service
Set) nelle quali i terminali si associano con un AP ed il traffico
tra le stazioni associate fluisce attraverso l'Access Point stesso
(i terminali associati con l'Access Point non comunicano direttamente
tra di loro). In una BSS può esistere solo un Access Point. Diverse
BSS possono essere interconnesse tramite un Distibution System (DS),
a formare un cosiddetto ESS (Extended Service Set). Viene definito
inoltre il Portale, ovvero un'entità che collega il Distribution System
con altre infrastrutture di rete integrate, ad esempio LAN Ethernet.
Si osservi che:
- le BSS possono sovrapporsi parzialmente
- le BSS possono essere disgiunte nello spazio
- possono essere collocate nella stessa area più ESS o anche reti con
topologia ad hoc Indipendent BSS (IBSS)
La figura seguente illustra la famiglia degli standard IEEE 802 e
la loro relazione con i livelli dello stack OSI/ISO:
Figure 5.4: La famiglia degli standard IEEE 802
Lo standard IEEE 802.11 contiene le definizioni del livello MAC e
del livello fisico, e specifica dei Servizi grazie ai quali
si può implementare un sistema di distribuzione e quindi una rete
ESS, la quale apparirà come un'unica BSS dal livello LLC (Logical
Link Control) dei terminali associati con un AP in una qualunque BSS.
I seguenti servizi (Distribution System Services) sono definiti per
la realizzazione di una topologia ESS:
- Associazione è il servizio con il quale le stazioni di una
BSS si associano ad un Access Point allo scopo di usufruire del Distribution
System. Grazie all'associazione, il Distribution System realizza una
mappa delle stazioni associate con i vari Access Point della ESS.
- Disassociazione è il servizio invocato per terminare un'associazione.
- Riassociazione è un servizio invocato per spostare l'associazione
di una stazione da un Access Point ad un altro, oppure per cambiare
dei parametri relativi ad un'associazione.
- Distribuzione è il servizio che si occupa di trasportare
i messaggi attraverso l'AP della BSS di appartenenza. Dev'essere usato
per ogni comunicazione da parte di una stazione associata con un Access
Point.
- Integrazione se il servizio di Distribuzione suddetto determina
che il destinatario finale di un messaggio è un membro di una LAN
integrata, allora il punto d'uscita del messaggio dal Distribution
System è un Portale anzichè un Access Point e viene invocato il servizio
di integrazione dopo il servizio di distribuzione.
Sono definiti inoltre i servizi SS (Station Services):
- Autenticazione è usato da tutte le stazioni per stabilire
la propria identità nei confronti delle stazioni con cui si vuole
comunicare90. Nel caso di topologia con infrastruttura, l'autenticazione è un
prerequisito per l'associazione e viene effettuata nei confronti dell'AP.
- Deautenticazione è un servizio invocato per terminare un'autenticazione.
Nel caso di topologia con infrastruttura, la deautenticazione comporta
la disassociazione.
- Privacy è il servizio che permette la cifratura dei messaggi
trasmessi.
- Trasporto dei pacchetti ogni stazione dev'essere in grado
di accedere al mezzo per inviare e ricevere pacchetti. Questo servizio
è usato dalle stazioni associate con una Access Point per comunicare
con l'Access Point e per comunicare fra stazioni non associate con
un Access Point (in modalità ad hoc).
Facciamo un esempio per chiarire meglio la topologia ESS e come viene
utilizzata. Osserviamo la figura
5.3
I terminali STA1 e STA2, come si vede dall'uguale colore delle antenne,
sono associati all'AP presente nella BSS1, così come i terminali STA4
e STA5 sono associati all'AP della BSS2. Le BSS 1 e 2, interconnesse
dal DS formano una ESS (in rosso). La STA3 viceversa si trova nell'area
di copertura dell'AP della BSS1 ma non è associata con esso. Dunque:
- la STA3, non essendo associata con l'AP, non può usare il sistema
di distribuzione per comunicare con terminali fuori dal suo raggio
d'azione.
- Una qualunque altra stazione delle BSS 1 e 2 può comunicare con le
altre usando il servizio di Distribuzione. Consideriamo un messaggio
che dev'essere inviato dalla STA1 alla STA4. Il messaggio viene ricevuto
dall'AP della BSS1, il quale lo inoltra al DS. Il DS si occupa di
determinare l'AP che serve il terminale STA4 e di inoltrargli il messaggio
del terminale STA1. Infine l'AP della BSS2 accede al mezzo per inviare
il messaggio al terminale STA4.
Possiamo a questo punto osservare che:
- la struttura interna del sistema di distribuzione non è specificata
nello standard. Può essere una comune infrastruttura LAN Ethernet,
come anche un altro sistema wireless. Tutto quello che lo standard
fa è definire i servizi che abbiamo citato e che devono essere supportati
dal DS.
- l'accesso al mezzo all'interno delle BSS è tipicamente distribuito
(DCF); tuttavia la topologia con infrastruttura e quindi la presenza
di un AP consente l'implementazione del metodo PCF (point Coordination
Function), che prevede il controllo centralizzato dell'accesso delle
stazioni al mezzo da parte dell'AP.
- la topologia ESS (Access Point e Distribution System) fornisce un
supporto per la transizione dei terminali mobili da una BSS ad un
altra all'interno della stessa ESS. E' prevista infatti la procedura
di Riassociazione con la quale si può implementare un sistema di roaming.
* Topologia ad hoc
Come abbiamo detto, lo standard IEEE 802.11 consente a due o più terminali
di comunicare direttamente, senza la presenza di alcuna infrastruttura
di rete.
Possiamo osservare che:
- l'unico metodo d'accesso disponibile è quello con acceso al mezzo
distribuito (DCF) (Distributed Coordination Function), che segue le
regole del protocollo CSMA/CA (Carrier Sense Multiple Access with
Collision Avoidance). Non è disponibile l'accesso controllato centralizzato
(PCF).
- non esiste un Distribution System, quindi i servizi di Associazione,
Disassociazione, Riassociazione, Distribuzione ed Integrazione non
sono disponibili.
- una IBSS può avere un numero qualsiasi di partecipanti.
- è possibile realizzare delle reti ad hoc di tipo multi hop ma, a differenza
di Bluetooth, che come abbiamo visto prevede il concetto di Scatternet,
un terminale non può appartenere a più di una IBSS.
Conclusioni
- Le topologie rappresentate dalla piconet Bluetooth e dalla
BSS con infrastruttura IEEE 802.11 presentano numerose analogie.
In entrambi i casi, il traffico è gestito da un'entità centralizzata
(master in Bluetooth e Access Point in IEEE 802.11), con la differenza
che nella piconet Bluetooth il master regola anche l'accesso degli
slave al canale mentre questa funzione91 è opzionale in un Access Point IEEE 802.11. Con questa topologia
dunque il routing dei pacchetti all'interno della singola cella base
è effettuato attraverso il master per Bluetooth ed attraverso l'Access
Point per IEEE 802.11.
Per quanto riguarda la capacità delle due topologie, il numero massimo
di unità gestite è 7 slave attivi nella piconet Bluetooth contro i
2007 terminali IEEE 802.11 gestibili da un singolo Access Point, mentre
il raggio di copertura delle reti è 10 m per una piconet Bluetooth
contro 150-300 m per una BSS IEEE 802.11.
Un Access Point IEEE 802.11 è in grado, per come è definito nello
standard, di comunicare e di far comunicare le stazioni ad esso associate
con una rete esterna. Analogamente, un dispositivo Bluetooth può essere
realizzato seguendo le linee guida tracciate nel LAN Access Profile
e nel PAN (Personal Area Network) Profile.
- Anche la scatternet Bluetooth e la topologia ad hoc
IBSS fornita da IEEE 802.11 presentano alcune analogie. Sono entrambe
reti ad hoc multihop, con topologia variabile dinamicamente, sebbene
la scatternet sia costituita da sottostrutture, le piconet, mentre
invece una rete ad hoc IEEE 802.11 non ha sottostrutture.
In entrambe, per ottenere una connettività globale fra le stazioni
è necessario un sistema di indirizzamento globale ed un meccanismo
di routing.
- mentre nel protocollo IEEE 802.11 esiste un sistema di indirizzamento
globale perchè i dispositivi vengono identificati da un indirizzo
MAC 802 (LAN), per il protocollo Bluetooth, occorre realizzare un
sistema di indirizzamento globale ad un livello superiore al MAC,
ad esempio a livello IP.
- per quanto riguarda il routing, entrambi gli standard non specificano
alcun meccanismo per il routing dei pacchetti all'interno delle scatternet
Bluettooth o delle reti ad hoc IEEE 802.11. Esiste un problema relativo
al routing comune ad entrambe le topologie, a causa della loro dinamicità:
la rottura dei link visto come evento molto più probabile che nel
caso di reti cablate. La rottura dei link potrebbe essere ad esempio
dovuta alla mobilità dei terminali della rete o alla comparsa di ostacoli
che blocchino i segnali radio. Tuttavia:
- per il protocollo IEEE 802.11, immediatamente sotto il livello di
routing abbiamo la struttura finale della rete, la rete ad hoc appunto.
La rottura dei link in questo caso non risulta in un cambiamento della
struttura della rete ad hoc.
- per il protocollo Bluetooth la scatternet non è l'unica struttura
sottostante il livello di routing, poichè una scatternet è costituita
da piconet. La rottura dei link provoca, in generale, la terminazione
di alcune piconet e la creazione di altre, con un conseguente cambiamento
non solo dei percorsi tra due nodi (routing) ma anche della struttura
stessa della scatternet.
- la topologia ESS non ha un concetto analogo nel protocollo
Bluetooth, a meno che non si realizzi una struttura nella quale due
o più piconet Bluetooth, realizzate secondo i profile LAN Access o
PAN, vengano interconnesse da una rete esterna, ad esempio una LAN
cablata.
5.3 Comunicazione all'interno delle reti
Ci proponiamo in questa sezione un confronto tra gli standard Bluetooth
e IEEE 802.11 riguardo alle caratteristiche delle comunicazioni tra
le stazioni appartenenti ad una stessa cella base. In Bluetooth la
cella base è la piconet, in IEEE 802.11 è il Basic Service Set (BSS).
Entrambi i protocolli utilizzano la banda ISM (Industrial Scientific
Medical) 2.4 GHz. La banda si estende da 2.4 GHz a 2.4835 GHz. Sono
disponibili dunque 83.5 MHz.
5.3.2 Utilizzo della banda, tecniche di modulazione e trasmissione RF
* Bluetooth
I dispositivi Bluetooth utilizzano la tecnica FHSS (Frequency Hopping
Spread Spectrum). Vengono definiti 79 canali
92 (frequenze di hopping), di ampiezza 1 MHz ciascuno. La comunicazione
avviene utilizzando i suddetti canali con una sequenza pseudocasuale,
diversa da piconet a piconet, generata a partire dall'indirizzo Bluetooth
del master della piconet. Tutti gli slave della stessa piconet conoscono
tale sequenza e sono sincronizzati con essa. Il canale operativo viene
cambiato in base a questa sequenza 1600 volte al secondo (1600 hops/s),
creando così una sequenza di
slot ciascuno di durata pari a
625μ
s. Il master iniza le proprie trasmissioni negli slot di
indice pari, gli slave iniziano le loro trasmissioni negli slot di
indice dispari. Un messaggio può durare da 1 a 5 slot consecutivi.
Per trasmettere i messaggi multislot, viene utilizzata per tutti gli
slot la frequenza di hopping corrispondente alla frequenza dello slot
in cui inizia il messaggio. Per modulare il segnale sul canale di
hop viene utilizzato lo schema di modulazione GFSK (Gaussian shaped
Frequency Shift Keying). Ogni canale ha una velocità di modulazione
dati pari a 1 Msimbolo/s che, con la modulazione GFSK, corrisponde
ad una velocità di trasferimento dati pari a 1 Mbps.
* IEEE 802.11
i dispositivi IEEE 802.11 utilizzano la tecnica DSSS (Direct Sequence
Spread Spectrum)
93. La banda disponibile viene suddivisa in 14 canali
94, parzialmente sovrapposti, ciascuno di ampiezza pari a 22 MHz. Tutti
i terminali appartenenti ad una stessa BSS (con infrastruttura o ad
hoc) utilizzano sempre lo stesso canale per le comunicazioni. Per
codificare il flusso dei dati trasmessi si usano due tecniche:
- sequenza di Barker: è la tecnica specificata nello standard IEEE 802.11,
il simbolo trasmesso è rappresentato da una sequenza di 11 chip
che codifica ogni singolo bit d'informazione. La velocità di modulazione
è 1 Msimbolo/s. Le tecniche di modulazione utilizzate sono la BPSK,
con la quale ogni simbolo codifica 1 bit d'informazione e quindi si
ottiene una velocità di trasferimento pari a 1 Mbps, e la QPSK, con
la quale ogni simbolo codifica 2 bit d'informazione e quindi si ottiene
una velocità di trasferimento pari a 2 Mbps.
- lo standard IEEE 802.11b, su cui si basano i dispositivi oggi in commercio,
usa invece la tecnica CCK (Complementary Code Keying): 16 bit trasmessi
sul canale codificano 4 o 8 bit d'informazione. Viene usata una velocità
di modulazione pari a 1.375 Msimboli/s con la tecnica QPSK. Quindi,
si ottiene una velocità di trasferimento pari a 5.5 Mbps quando il
simbolo, o codice CCK, codifica 4 bit d'informazione, mentre si ottiene
una velocità di trasferimento pari a 11 Mbps quando il simbolo codifica
8 bit d'informazione. Tutti i dispositivi conformi allo standard IEEE
802.11b sono interoperabili con i dispositivi IEEE 802.11.
5.3.3 Potenza di trasmissione
Lo standard Bluetooth impone dei limiti alla potenza di emissione
radio dei dispositivi, limiti che possono essere riassunti nella seguente
tabella:
| Potenza d'uscita
massima | Potenza d'uscita nominale | Potenza d'uscita minima |
| 100 mW(20 dBm) | N/D | 1 mW(0 dBm) |
| 2.5 mW(4 dBm) | 1 mW(0 dBm) | 0.25 mW(-6 dBm) |
| 1 mW(0 dBm) | N/D | N/D |
Table 5.3: Classi di potenza dei dispositivi Bluetooth
Lo standard IEEE 802.11 prevede che:
- sia previsto almeno un livello di potenza con EIRP (Equivalent Isotropic
Radiated Power) pari a 10 mW;
- per i dispositivi con livelli di potenza massima superiori a 100 mW
EIRP, sia previsto almeno un livello di potenza pari a 100 mW EIRP
(o ad un livello inferiore).
5.3.4 Pacchettizzazione e throughput
* Bluetooth
Lo standard Bluetooth, come si può vedere dalle tabelle
3.6
e
3.7, prevede una differenziazione dei pacchetti
in base sostanzialmente a:
- tipo di link che si vuole realizzare, ovvero asincrono (ACL95) o sincrono (SCO96)
- livello di protezione contro gli errori
I pacchetti ACL sono tutti protetti da un CRC (Cyclic Redundancy Check)
a 16 bit
97, mentre tale protezione non è prevista per i pacchetti SCO. E' previsto
per alcuni pacchetti ACL e SCO anche un metodo di correzione FEC (Forward
Error Correction) con rapporto 1/3 (ogni bit d'informazione viene
replicato 3 volte) e 2/3 (si usa un 15/10 shortened Hamming code,
cioè vengono aggiunti 5 bit di parità ogni 10 bit d'informazione).
Un link SCO utilizza sempre pacchetti monoslot e la dimensione dei
pacchetti è fissa; esso fornisce un throughput simmetrico di 64 kb/s
e la quantità d'informazione trasportabile con un pacchetto va da
10 byte (pacchetto HV1, nessun CRC, 1/3 FEC) a 30 byte (pacchetto
HV3, nessun CRC, nessun FEC). Un link ACL prevede dei pacchetti estesi
su 1, 3 o 5 slot. La dimensione del
payload (il contenuto informativo
vero e proprio) dipende dal tipo di pacchetto, e può variare da 17
byte (pacchetto DM1, CRC, FEC 2/3) fino a 339 byte (pacchetto DH5,
CRC, nessun FEC). Un link di tipo ACL consente diversi bit rate asimmetrici,
fino ad una differenza massima di 723.2 kbps in una direzione e 57.6
kbps nell'altra.
* IEEE 802.11
La dimensione del payload varia da 0 a 2304 byte. L'intero frame IEEE
802.11, header e payload, viene protetto da un CRC32. Non è previsto
alcun FEC. Un dispositivo IEEE 802.11b è capace di trasmettere ad
una velocità pari a 11 Mbps lordi.
- La tecnica FHSS adottata da Bluetooth e la tecnica DSSS usata da IEEE
802.11b possono essere cosi confrontate:
- il sistema FHSS adottato da Bluetooth è meno sensibile del sistema
DSSS IEEE 802.11b alle interferenze a banda stretta che influenzano
solo uno o un piccolo numero di frequenze di hop. Infatti entrambi
i protocolli prevedono la ritrasmissione dei pacchetti che non vengono
ricevuti correttamente. IEEE 802.11 usa la cosiddetta time diversity
per eseguire le ritrasmissioni, ovvero un pacchetto non ricevuto correttamente
viene trasmesso in seguito ma utilizzando la stessa banda di frequenze.
Dunque, se la perdita del pacchetto fosse stata causata da un'interferenza
che permane in quella banda quando si tenta di ritrasmetterlo, il
pacchetto sarebbe perso ancora una volta. D'altra parte Bluetooth
usa la cosiddetta frequency diversity, ovvero la ritrasmissione
di un pacchetto perso avviene utilizzando un altro canale di hop,
evitando l'interferenza che aveva causato la perdita del pacchetto.
- la tecnica FHSS usata da Bluetooth offre una maggiore sicurezza della
tecnica DSSS usata da IEEE 802.11 riguardo ai tentativi di decodifica
del segnale da parte di stazioni non autorizzate in ascolto nella
banda radio ISM.
- il protocollo IEEE 802.11b prevede l'aggiustamento dinamico della
velocità di trasferimento dati in base alla qualità del segnale sul
canale trasmissivo; la scelta di uno dei 4 data rate possibili viene
effettuata dinamicamente dal livello fisico (PHY) e quindi in maniera
trasparente ai livelli superiori del protocollo, compreso il MAC.
Qualcosa di simile si può realizzare anche con i dispositivi Bluetooth,
che permettono di cambiare dinamicamente il tipo di pacchetti (tra
quelli visti in 3.6) in base alla qualità della
ricezione di un singolo link. Tuttavia, questa procedura è gestita
a livello Link Manager.
- il protocollo IEEE 802.11b offre un throughput maggiore del protocollo
Bluetooth a livello del singolo link tra due stazioni, essenzialmente
perchè la velocità di trasmissione sul canale è di 1Mbps per
Bluetooth contro i 22 Mbps per IEEE 802.11. Se consideriamo le due
topologie base dei protocolli, la piconet e la BSS (con infrastruttura
oppure ad hoc) notiamo che l'accesso al mezzo sincrono e controllato
realizzato nella piconet Bluetooth consente un throughput meno sensibile
al carico della rete di quello realizzato utilizzando il metodo Distributed
Coordination Function (DCF) del protocollo IEEE802.11b. In quest'ultimo
caso, al crescere del traffico nella rete la banda disponibile è ridotta
dalle collisioni che avvengono per guadagnare l'accesso al mezzo condiviso.
Il termine QoS (Quality of Service) si riferisce ad un'ampia gamma
di parametri che si riferiscono alle capacità che una rete ha di fornire
risultati predicibili in maniera deterministica o statistica; tali
parametri comprendono: disponibilità dei servizi, banda, ritardo,
tasso d'errore.
* Bluetooth
offre come abbiamo visto due tipi diversi di link:
- Asincrono orientato al pacchetto (ACL)
- Sincrono orientato alla connessione (SCO)
Il link
SCO viene tipicamente utilizzato per il trasporto
di traffico
real-time come, ad esempio, traffico audio o video.
Tale link prevede che il master riservi degli slot utilizzabili solo
per il traffico SCO. Uno slave può realizzare fino a 3 link SCO con
lo stesso master oppure 2 con master diversi. I pacchetti di un link
SCO non vengono mai ritrasmessi, non sono protetti da un CRC ma è
previsto solo un algoritmo FEC (1/3 o 2/3). La banda di un link SCO
è sempre 64kbps. Osserviamo la seguente tabella che riporta i data
rate tipici di alcuni sistemi audio:
| Sistema | Qualità | Data rate (kbps) |
| Audio CD | Stereo 16 bit @ 44.1KHz | 1411.2 |
| Audio MP3 | Qualità vicina al CD | 128 |
| POTS (Telefono) | Mono 8 bit @ 8KHz | 64 |
| GSM Audio | Mono 8 bit @ 8KHz | 13.2 |
Table 5.4: Confronto tra i data rate di alcuni sistemi Audio
Bluetooth utilizza i link SCO per realizzare un sistema audio adeguato
alla trasmissione della voce e di musica a media qualità.
Per quel che riguarda un link SCO possiamo dunque osservare che:
- fornisce una banda ed un ritardo garantiti, a meno delle interruzioni
causate dai messaggi LMP (Link Manager Protocol) di tipo broadcast,
che hanno precedenza sui link SCO;
- fornisce solo una banda di tipo simmetrico e costante: alcune applicazioni
(tipo streaming) spesso richiedono una banda asimmetrica e
variabile;
- la trasmissione non è affidabile: non sono infatti previste ritrasmissioni
e per di più le capacità di correzione degli errori fornite dalla
protezione FEC sono limitate agli errori su uno o due bit, per cui
sono inefficaci per treni di errori. Le interferenze con WLAN IEEE
802.11 o forni a microonde causano spesso treni di errori (errori
burst);
- i messaggi LMP (Link Manager Protocol) di tipo broadcast hanno precedenza
sul traffico SCO.
Il link
ACL viene tipicamente utilizzato per traffico dati
senza particolari richieste temporali e di banda. Gli slave possono
inviare solo un pacchetto alla volta al master secondo uno schema
round robin
. Tra due dispositivi Bluetooth qualsiasi
può esistere solo un link di tipo ACL. Il link ACL può offrire una
banda simmetrica oppure asimmetrica. La banda disponibile su un link
ACL è legata al tipo di pacchetti utilizzati per quel particolare
link ed alla frequenza con la quale il dispositivo viene interrogato.
I pacchetti ACL sono protetti da un CRC16 e come opzione è prevista
anche la protezione FEC 2/3. E' prevista la ritrasmissione dei pacchetti
ACL secondo uno schema ARQ (Automatic Repeat Request).
Per quel che riguarda un link ACL possiamo dunque dire che:
- si può ottenere una certa affidabilità anche in caso di treni di errori,
grazie al meccanismo di ritrasmissione dei pacchetti con timeout configurabile:
si può scegliere di non effettuare affatto le ritrasmissioni, di effettuare
infinite ritrasmissioni (reliable link) oppure si può configurare
un valore intermedio di ritrasmissioni;
- è possibile supportare applicazioni che richiedono una banda asimmetrica
e variabile;
- gli slot riservati al traffico SCO hanno priorità sul traffico ACL,
il che riduce la banda disponibile per un link ACL in presenza di
link SCO;
- anche i messaggi LMP hanno priorità sui pacchetti ACL;
- l'utilizzo dei Low Power Modes (Hold, Sniff e Park) influisce sulla
banda e sul ritardo delle comunicazioni che avvengono su un link ACL.
Tali modalità infatti riguardano solo i link ACL e non i link SCO
che vengono comunque garantiti;
- siccome uno slave può attivare un singolo link ACL, tutte le applicazioni
di livello superiore che lo utilizzano devono condividerne le caratteristiche,
come la quantità di ridondanza FEC ed il timeout di ritrasmissione.
Il protocollo Bluetooth fornisce una configurazione QoS dei link ACL,
i quali vengono adattati, quando possibile, alle richieste dei livelli
superiori dello stack Bluetooth. I parametri che possono essere configurati
sono:
- Type of QoS: da scegliere tra nessuno, Best Effort e Guaranteed. Best
effort è il servizio standard.
- Token Rate: il data rate garantito ad una applicazione su quel link.
- Token rate bucket size: è una misura di quanto spazio (buffer) verrà
riservato per i dati ricevuti. I link che realizzano applicazioni
con trasferimenti burst avranno bisogno di uno spazio maggiore
dei link che realizzano applicazioni con flussi di traffico continui.
- Peak bandwidth: il data rate massimo al quale le applicazioni possono
mandare pacchetti uno di seguito all'altro.
- Latency: il ritardo massimo tra l'istante in cui un'applicazione invia
un bit e l'istante in cui tale bit viene trasmesso sul mezzo radio
per la prima volta (la latenza reale può dunque essere più elevata
a causa delle ritrasmissioni).
- Delay variation: la differenza tra il più grande ed il più piccolo
ritardo che un pacchetto può presentare. Questo parametro avrà effetto
sulla scelta delle dimensioni del buffer necessario a ricomporre un
flusso continuo di dati.
Quando il QoS non è configurato, il dispositivo Bluetooth usa i seguenti
valori (default):
- Tipo di servizio: Best Effort
- Token Rate: non specificato
- Token Bucket Size: nessun bisogno
- Peak BW: sconosciuto
- Latency: non importa
- Delay variation: non importa
L'uso di questi parametri è implementato tramite primitive che interrogano
il master. Se il master accetta la richiesta di QoS, configura il
link ACL con lo slave impostando i due parametri:
- Poll Interval: intervallo massimo tra due interrogazioni consecutive
dello slave
- NBC : numero di ritrasmissioni dei pacchetti broadcast. Questi
ultimi non possono essere confermati (ACK) e quindi vanno ritrasmessi
più volte per aumentare l'affidabilità.
Inoltre il Link Manager può comunicare ai livelli superiori dello
stack le violazioni dei parametri QoS richiesti.
* IEEE 802.11
offre il metodo d'accesso al mezzo detto Point Coordination Function
(PCF), alternativo al Distributed Coordination Function (DCF). L'utilizzo
di questo metodo d'accesso è limitato alla topologia con infrastruttura
e prevede che una stazione detta Point Coordinator (PC), che di solito
coincide con l'Access Point, regoli l'accesso al mezzo delle stazioni
che richiedono di far parte di una polling list, interrogandole
con uno schema round robin e garantendo loro l'accesso al mezzo.
In ogni caso, una parte del canale dev'essere comunque dedicata all'accesso
con contesa. Viene definito infatti un intervallo temporale detto
superframe, composto da un Contention Free Period (CFP) durante
il quale vige il metodo PCF, ed un periodo, Contention Period (CP),
durante il quale vige il metodo DCF. Il CP deve durare abbastanza
da permettere almeno l'invio di un frame.
Il metodo d'accesso PCF presenta le seguenti caratteristiche:
- La dimensione temporale di un periodo CFP può venire ridotta da un
residuo di traffico DCF.98Dunque, non è garantita un'effettiva allocazione temporale delle risorse
del canale, poichè gli istanti di inizio dei periodi CFP non vengono
necessariamente preservati.
- Una stazione interrogata dal PC può trasmettere solo un frame, di
dimensione variabile tra 0 e 2304 byte. All'inizio di un CFP non è
nota la quantità totale dei dati che tutte le stazione della polling
list devono inviare. A causa della variabilità dei payload dei frame
delle stazioni interrogate e del tempo necessario a trasmettere tali
frame, il PC potrebbe non riuscire ad interrogare tutte le stazione
della polling list entro il CFP. Le stazioni che rimangono escluse,
dovranno ritardare ulteriormente le loro trasmissioni, e quindi viene
introdotto del ritardo che potrebbe non essere accettabile per applicazioni
time-bounded.
* Conclusioni
- Il problema del supporto QoS a livello MAC non è stato affrontato
dallo standard IEEE 802.11 fino ad ora. Sono attualmente allo studio
del Task Group IEEE 802.11e diverse modifiche al MAC IEEE
802.11 che offrano supporto per applicazioni che richiedono un certo
QoS.
- I link Bluetooth di tipo sincrono (SCO) non hanno analogo
nel protocollo IEEE 802.11. Tali link consentono la realizzazione
di applicazioni voce (telefonia, audio a bassa qualità) direttamente
sfruttando delle caratteristiche del MAC, senza richiedere complicate
funzioni a livelli superiori.
- Confrontiamo il metodo d'accesso PCF IEEE 802.11 ed i link
Bluetooth di tipo asincrono (ACL).
In entrambi i casi, un'unità centrale stabilisce l'accesso al mezzo
delle altre stazioni della rete secondo un certo ordine. Uno slave
Bluetooth può richiedere la soddisfazione dei parametri QoS fondamentali
(banda, ritardo, variabilità del ritardo) sul link ACL. Ogni slave
può avere una sola connessione ACL , quindi diverse applicazioni,
anche con diverse richieste QoS, dovranno condividerla. La negoziazione
dei parametri QoS è effettuata in Bluetooth secondo segnalazioni definite
dal Link Manager.
Non esiste invece alcun tipo di analoga segnalazione QoS per le stazioni
IEEE 802.11. Una stazione associata con un Access Point che opera
come Point Coordinator può richiedere di essere inserita nella polling
list, ma non è garantito che le sue richieste verranno soddisfatte
per i problemi che abbiamo citato riguardo la gestione del periodo
Contention Free.
In questo capitolo ci proponiamo di confrontare due soluzioni wireless
attualmente sul mercato, una per realizzare dispositivi IEEE 802.11b
ed una per realizzare dispositivi Bluetooth. Il confronto si focalizzerà
principalmente sul consumo di potenza e sul costo dei dispositivi.
6.1 Intersil PRISM per IEEE 802.11b
La
Intersil Corp. (
http://www.intersil.com) rappresenta
attualmente uno dei più grossi produttori di hardware per la realizzazione
di dispositivi IEEE 802.11
99, in tutte le sue versioni da IEEE 802.11b fino a IEEE 802.11a e IEEE802.11g.
D'altra parte, essa ha raccolto l'eredità della
Harris Semiconductor
che, insieme a
Lucent Technologies, propose le modifiche allo
standard IEEE 802.11 che portarono nel 1999 alla nascita dell'attuale
IEEE 802.11b.
6.1.1 Caratteristiche dell' hardware
Attualmente la Intersil offre la soluzione PRISM v3.0, per la realizzazione
di dispositivi compatibili con lo standard IEEE 802.11. Il chipset
PRISM 3 realizza sia il livello fisico (RF) che il livello MAC compatibili
con lo standard IEEE 802.11b.
Nella figura
6.1 possiamo osservare una schematizzazione
del sistema PRISM 3:
Figure 6.1: Soluzione PRISM 3 per IEEE802.11b
Tale sistema è composto da:
- un processore Baseband/MAC (ISL3871) con le seguenti caratteristiche:
- Interfaccia USB 1.1.
- Firmware che realizza tutte le funzioni previste dallo standard IEEE
802.11b e aggiornabile.
- Scan attivo autonomo, attivabile tramite un comando dall'host.
- Processore DSSS in banda base completo.
- Modulazioni DBPSK, DQPSK.
- Codifiche CCK (codifica usata per ottenere gli 11mbps) e Sequenza
di Barker (per la compatibilità con i dispositivi IEEE 802.11 a 1
e 2 Mbps).
- Convertitori integrati A/D e D/A per AGC e controllo adattivo della
potenza di trasmissione.
- Un amplificatore RF (ISL3984)
- Un VCO (Voltage Controlled Oscillator) (ISL3084)
- Un chip che implementa il livello radio (ISL3684)
6.1.2 Cosa offre lo standard IEEE 802.11 per la riduzione del consumo di
potenza
Un dispositivo IEEE 802.11, in un istante qualsiasi, può trovarsi
in uno dei seguenti due stati:
- Awake: la stazione è completamente operativa
- Doze: la stazione non riceve né trasmette ed il consumo di potenza
è ridotto.
Conseguentemente abbiamo due modalità di
Power Management:
- Active Mode (AM)
- Power Save Mode (PS)
La gestione delle stazioni in PS è ovviamente diversa a seconda della
topologia della nostra rete IEEE 802.11:
* Topologia con infrastruttura
Una stazione in AM che vuole entrare in PS, deve effettuare con successo
uno scambio di pacchetti con l'Access Point cui è associata (ovvero
deve ricevere un Acknowledgement), modificando il bit dedicato al
Power Management contenuto nell'header dei pacchetti. In questa topologia
infatti, l'Access Point si occupa di archiviare tutto il traffico
destinato alle stazioni della rete che si trovano in PS.
L'Access Point costruisce la mappa virtuale delle stazioni
in PS e del traffico ad esse destinato e comunica tale mappa tramite
l'elemento TIM (Traffic Indication Map) contenuto in ogni Beacon che
esso invia periodicamente. La modalità PS delle stazioni prevede che,
ad intervalli regolari e configurabili, le stazioni stesse rientrino
nello stato AM per ricevere i Beacon inviati dall'Access Point e quindi
sapere se quest'ultimo ha del traffico bufferizzato per loro. Nel
caso una stazione non rilevi dal TIM che l'Access Point ha del traffico
indirizzato a se stessa, può tornare nello stato PS, fino al prossimo
istante prescelto per l'ascolto del beacon. Nel caso contrario invece,
la stazione può richiedere l'invio del traffico bufferizzato nell'Access
Point, inviandogli un frame di tipo PS-Poll cui l'Access Point risponde
appena possibile inviando il traffico bufferizzato per quella stazione.
Una stazione che vuole rientrare in Active Mode dalla modalità Power
Save, deve effettuare l'operazione detta Clear Channel Assesment (CCA)
per rilevare la presenza di eventuali trasmissioni in corso sul canale
ed, in caso ve ne siano, ritardare il tentativo d'accesso al mezzo
con le modalità previste dal MAC.
* Topologia ad hoc
In questa topologia le stazioni possono comunque utilizzare la modalità
Power Save ma, visto che non esiste un Access Point, tutte le stazioni
devono occuparsi di bufferizzare il traffico di tutte le stazioni
che si trovano in Power Save. Viene definita un finestra temporale
(ATIM Window), durante la quale tutte le stazioni in Power
Save si portano nello stato Awake per ricevere dei frame particolari,
gli ATIM (ad hoc TIM). Le stazioni che hanno del traffico bufferizzato
per qualche altra stazione in Power Save, durante l'ATIM Window accedono
al mezzo per inviare frame di tipo ATIM direttamente indirizzate alle
stazioni che devono ricevere il traffico bufferizzato. Se queste stazioni
ricevono correttamente il frame ATIM, rimangono nello stato Awake
anche dopo la fine della ATIM Window, per ricevere il traffico ad
esse destinate; in caso contrario le stazioni possono tornare nello
stato Power Save fino alla prossima finestra ATIM.
Possiamo osservare che:
- le stazioni che vogliono entrare in Power Save non hanno una stazione
referente analoga all'Access Point cui comunicare tale cambiamento
di stato. Dunque lo stato istantaneo di una stazione, Awake o Doze,
può essere solo stimato da tutte le altre stazioni della rete ad hoc,
ad esempio in base alla storia delle precedenti trasmissioni. Lo standard
non specifica alcun metodo per la stima dello stato Power Management
delle stazioni in una rete con topologia ad hoc;
- l'invio e la ricezione dei frame ATIM durante la finestra ATIM Window
avviene secondo le regole del metodo Distributed Coordination Function
(DCF), ovvero secondo il metodo d'accesso CSMA/CA. A seconda del traffico
presente sul mezzo trasmissivo, potrebbe anche non essere possibile,
per una stazione con del traffico bufferizzato per un'altra stazione
in Power Save, riuscire a mandare il frame ATIM, oppure potrebbe non
essere possibile, per la stazione che deve ricevere il traffico, mandare
un frame ACK verso la stazione che ha bufferizzato il traffico, impedendo
di fatto la trasmissione del suddetto traffico dopo la finestra ATIM.
Quindi, in definitiva, lo standard IEEE 802.11 specifica un solo stato
a basso consumo di potenza, lo stato Doze, e dà la possibilità di
configurare i tempi in cui una stazione rimarrà nello stato Doze (tramite
il parametro ListenInterval, che specifica l'intervallo di tempo che
intercorre tra l'ascolto consecutivo di due beacon).
6.1.3 Cosa offrono i chipset PRISM per la riduzione del consumo di potenza
I chipset della famiglia PRISM sono stati largamente impiegati per
la realizzazione di WNIC (wireless network interface card), che possiamo
trovare in diversi
form factor: PCI, PCMCIA, e ultimamente
anche in dispositivi USB e CompactFlash, quest'ultime utilizzate nei
computer
palmari. La figura
6.2 illustra
un diagramma di stato per un WNIC IEEE 802.11:
Figure 6.2: Macchina a stati per la gestione dell'alimentazione di una scheda
wireless IEEE 802.11
Negli stati
transmit e
receive la radio funziona a piena
potenza e la scheda wireless trasmette e riceve attivamente. Nello
stato
idle la radio è funzionante, ovvero il dispositivo è
in ascolto sul mezzo trasmissivo, ma in questo stato il dispositivo
non passa alcun dato che riceve ai livelli superiori, ovvero al software
che gestisce le comunicazioni tramite la scheda wireless. Nello stato
sleep anche la radio viene spenta, mentre altri dispositivi,
quali i clock di riferimento, rimangono accesi. Infine nello stato
off, il dispositivo è completamente spento. Alcuni degli stati
illustrati in figura
6.2 sono invisibili da
parte del software che gestisce la scheda wireless. Ad esempio, a
livello del sistema operativo, gli stati transmit, receive e idle
sono visti come un unico stato
on.
Chipset PRISM di prima generazione
I chipset PRISM di prima generazione, come si può vedere nel documento
[
3] del 1997, offrono diverse modalità Power Save
che sarà il MAC a selezionare in base agli intervalli tra due periodi
consecutivi di Awake.
La seguente tabella riassume tali modalità ed i relativi consumi,
relativamente ad una scheda PCMCIA:
| Tempi | |
| Modalità | TX | RX | Power Save | Recupero | Consumo |
| TX (continua) | 100% | - | - | - | 488mA |
| RX (continua) | - | 100% | - | - | 287mA |
| Corrente media senza Power Save | 2% | 98% | - | - | 290mA |
| Corrente media con Power Save | 2% | 8% | 90% (Mode 4) | - | 50mA |
| Power Saving mode 1 | - | - | 100% | 1μs | 190mA |
| Power Saving mode 2 | - | - | 100% | 25μs | 70mA |
| Power Saving mode 3 | - | - | 100% | 2ms | 60mA |
| Power Saving mode 4 | - | - | 100% | 5ms | 30mA |
Table 6.1: Modalità Power Save disponibili con il chipset PRISM e consumi di
una scheda PCMCIA
Osserviamo come sia importante la scelta della modalità Power Save
anche in base al tempo di recupero che ciascuna modalità offre. I
livelli con minore consumo di potenza richiedono più tempo nel ritorno
allo stato attivo perchè consentono la scarica dei condensatori, che
andranno ricaricati ritornando in modalità attiva, e lo spegnimento
di componenti quali oscillatori che andranno riconfigurati al ritorno
in modalità attiva.
Chipset PRISM di seconda generazione
I modelli di chipset della famiglia PRISM 2 offrono una riduzione
su tutti i consumi visti nella tabella
6.1.
Non è stato possibile tuttavia reperire delle informazioni dettagliate
come quelle del chipset PRISM di prima generazione come mostra la
tabella
6.2:
| Tempi | |
| Modalità | TX | RX | Power Save | Recupero | Consumo |
| TX (continua) | 100% | - | - | - | 325mA max |
| RX (continua) | - | 100% | - | - | 215mA max |
| Corrente media senza Power Save | 2% | 98% | - | - | 187mA |
| Corrente media con Power Save | 2% | 8% | 90% (Mode 4) | - | 43mA |
| Power Saving mode 1 | - | - | 100% | ? | ? |
| Power Saving mode 2 | - | - | 100% | ? | ? |
| Power Saving mode 3 | - | - | 100% | ? | ? |
| Power Saving mode 4 | - | - | 100% | ? | 25mA |
Table 6.2: Consumi di una scheda PCMCIA basata sul chipset PRISM 2
Chipset PRISM di terza generazione
Attualmente non è stato possibile avere alcuna informazione sui consumi
delle schede realizzate con il chipset PRISM 3, anche se è lecito
aspettarsi un'ulteriore riduzione dei consumi stessi grazie all'elevata
integrazione raggiunta dalla suddetta soluzione.
Implementare lo standard con i chipset PRISM
Abbiamo visto come lo standard IEEE 802.11 prevede una sola modalità
Power Save, con la possibilità di configurare quanti beacon ascoltare
e quindi quanto effettivamente rimanere nello stato Doze.
- Supponiamo che una stazione voglia ascoltare tutti i beacon trasmessi
in una rete. Tipicamente l'intervallo di ripetizione dei beacon viene
scelto intorno ai 100ms, per cui, visti i tempi di recupero delle
modalità power save offerte dai chipset PRISM (vedi tabella 6.1),
non ci sono limitazioni all'uso di una qualsiasi delle 4 modalità.
Se al contrario, l'intervallo di ripetizione dei beacon fosse fissato
in una rete a 1 ms ad esempio, le modalità Power Save 3 e Power Save
4 sarebbero inutilizzabili visti i loro tempi di recupero più elevati.
Il kit Intersil PRISM 3, 11 Mbps comprendente:
- ISL3084 (SiGe VCO)
- ISL3684 (Transceiver, Direct Up/Down Converter, Single Chip PHY)
- ISL3871 (Integrated BaseBandProcessor/MAC per USB/PCMCIA, 11Mbps DS
Controller)
- ISL3984 (SiGe RF Power Amplifier, 2.4GHz-2.5GHz, +18dBm con Detector,
Package MLFP)
- ISL3872 (Integrated BaseBandProcessor/MAC per mini-PCI, 11Mbps DS
Controller)
costa circa
40USD in lotti fino a 5000 pezzi. Oltre al chipset,
la Intersil offre:
- Reference Design che includono tutto il necessario per realizzare
e testare i prodotti in differenti form factor (ovvero includono
schemi Cadence per CAD elettronico, Layout Allegro per IC, schemi
per l'assemblaggio dei componenti, utility dedicate per il test dei
dispositivi, dettagli sulla costruzione dell'antenna, schemi per circuiti
stampati)
- diversi Evaluation Kit per i vari form factor (PCMCIA, USB,
PCI).
6.2 CSR Bluecore per Bluetooth
La
CSR (
Cambridge Silicon Radio) (
http://www.csr.com)
progetta e realizza dispositivi a singolo chip realizzati in tecnologia
CMOS per dispositivi Bluetooth. Attualmente l'offerta CSR si compone
dei dispositivi
Bluecore01 e
Bluecore2. Entrambe
queste soluzioni sono costituite da un singolo chip che realizza i
livelli Baseband e Radio (vedi stack Bluetooth a pagina
pageref).
- Per il Bluecore01 è prevista l'aggiunta di una memoria flash
contenente il firmware, ovvero il software che implementa alcune
parti dello stack del protocollo Bluetooth realizzato dalla stessa
CSR. Il firmware implementa il Link Controller, il Link Manager, ed
il livello Host Controller Interface (HCI), ma può come opzione includere
anche il livello Logical Link Control and Adaptation Protocol (L2CAP),
il protocollo di emulazione seriale RFCOMM ed il protocollo Service
Discovery Protocol (SDP).
- La famiglia Bluecore2 comprende invece più soluzioni, a seconda che
si voglia la memoria flash, contenente il firmware, direttamente sul
chip (Bluecore2-ROM o Bluecore2-Flash), oppure la si voglia esterna
(Bluecore2-External). E' inoltre possibile avere sul chip un codec
audio mono lineare a 15 bit, ad esempio Bluecore2-Audio. Il chip Bluecore2
è realizzato in tecnologia CMOS 0,18μ e presenta dimensioni e
consumo di potenza approssimativamente dimezzati rispetto al chip
Bluecore01.

Figure 6.3: Schema del chip CSR Bluecore01b per Bluetooth
6.2.1 Metodi standard Bluetooth per la gestione del consumo di potenza
Lo standard Bluetooth specifica due stati principali di attività dei
dispositivi:
- Standby: in questo stato non viene scambiato alcun tipo di
dato e la sezione radio è spenta. Rimane acceso solo il contatore
che realizza il clock interno di ogni dispositivo.
- Connection: in questo stato ogni dispositivo ha stabilito
la propria connessione con il master della piconet. In questo stato
si possono distinguere quattro sottostati, in ordine di consumo di
potenza decrescente:
- Active Mode: in questa modalità, il dispositivo Bluetooth
partecipa attivamente alla piconet. Il master inizia le proprie trasmissioni
negli slot d'indice pari, mentre gli slave iniziano le proprie trasmissioni
negli slot d'indice dispari.
- Sniff Mode: questa è una modalità a basso consumo di potenza
perchè viene ridotta l'attività di ascolto degli slave. Infatti uno
slave stabilisce di ascoltare le trasmissioni ad esso indirizzate
solo in determinati sniff-slots, che si ripetono periodicamente,
mentre non ascolta il traffico della piconet per il resto del tempo.
In questa modalità lo slave è comunque considerato un membro attivo
della piconet.
- Hold Mode: questa modalità è usata per fermare il traffico
asincrono (ACL) di uno dispositivo per un certo periodo di tempo.
Durante il periodo di Hold, il dispositivo può effettuare, ad esempio,
le procedure di Inquiry o Page, oppure può partecipare all'attività
di un'altra piconet. In questa modalità il dispositivo è comunque
considerato un membro attivo della piconet.
- Park Mode: questa modalità fornisce il consumo di potenza
più basso. In questa modalità, uno slave cessa di essere un membro
attivo della piconet, non può trasmettere e non può essere indirizzato
dal master per ricevere dati. Lo slave si attiva solo in determinati
istanti, i beacon instant, per ricevere una serie di pacchetti,
i beacon, che servono a tenere gli slave in modalità park sincronizzati
col canale della piconet, e servono al master per inoltrare richieste
di un-park agli slave. E' previsto anche un meccanismo di richiesta
di un-park da parte degli slave, che consiste in una serie di finestre
d'accesso (Access Windows) che segue immediatamente la serie dei beacon
trasmessi dal master e durante le quali gli slave in park mode possono
fare in sequenza le loro richieste di un-park.
I chip della famiglia Bluecore offrono due modalità specifiche per
ridurre il consumo di potenza:
- Shallow Sleep Mode: viene ridotto il clock del processore
presente sul chip Bluecore. Questo, al massimo, comporta una riduzione
del consumo di corrente del chip fino al valore di 2mA per i chip
Bluecore01, poco meno per i chip Bluecore2.
- Deep Sleep Mode: la maggior parte della circuiteria sul chip
viene spenta. Questo porta una riduzione del consumo di corrente del
chip fino al valore di 100μA per Bluecore01, ancora meno per
Bluecore2. Tuttavia sono necessari circa 10 ms per entrare in questa
modalità, ed almeno altri 10 ms per uscirne. Inoltre, l'uso di questa
modalità è previsto solo se non sono presenti link SCO e tutti i link
ACL si trovano in una delle modalità Power Save previste dallo standard
Bluetooth (Hold, Sniff, Park). L'uso del Deep Sleep comporta delle
altre restrizioni:
- PCM: la porta PCM dev'essere inattiva.
- USB: se il chip ha una connessione USB con l'host e tale connessione
è nello stato active, il deep sleep non può essere usato.
- BCSP (Bluecore Serial Protocol): il deep sleep può essere usato anche
se il chip ha una connessione BCSP verso l'host, poiché tale connessione
ha un meccanismo per recuperare i dati persi o corrotti (ritrasmissione)
- H4 (UART): se il chip ha una connessione UART verso l'host, l'uso
del deep sleep comporta la chiusura di questa connessione con la conseguente
perdita dei dati da e verso l'host stesso.
Di seguito possiamo osservare i dati riportati nei datasheet reperibili
sul sito della CSR:
Figure 6.4: Consumo di potenza del chip CSR Bluecore01
I dati della
6.4 sono relativi al modulo
BC01b-USB più una memoria flash ROM esterna.
Figure 6.5: Consumo di potenza del chip CSR Bluecore2-External
I dati della figura
6.5 sono la somma
dei consumi del chip Bluecore2 e della memoria Flash esterna, tranne
per il consumo in Deep Sleep che riguarda solo il chip Bluecore2.
Come si vede dalle figure, il chip Bluecore2, anche in versione External
quindi comparabile con il chip Bluecore01, offre delle prestazioni
migliori del modello Bluecore01 in termini di consumo di potenza.
Attualmente il costo del chip Bluecore2-External è pari a 70 USD (escluso
tasse) per unità da 5 pezzi.
Come abbiamo potuto osservare nelle tabelle
6.1,
6.2,
6.4e
6.5,
il consumo di potenza dei dispositivi compatibili con lo standard
Bluetooth è decisamente inferiore al consumo di potenza dei dispositivi
compatibili con lo standard IEEE 802.11(b) e questo conferma tra l'altro
la diversa posizione dei due standard rispetto alle applicazioni possibili.
A titolo d'esempio riportiamo due possibili scenari d'utilizzo per
confrontare le prestazioni dei dispositivi esaminati rispetto al consumo
di potenza:
Conclusioni
Lo sviluppo delle comunicazioni wireless, dai telefoni cellulari fino
alle wireless LAN, è in continua crescita. Molte sono le proposte
riguardo gli standard per tali comunicazioni ed ognuna di queste offre
dei vantaggi e degli svantaggi. In generale, la scelta di utilizzare
un dispositivo conforme ad uno standard piuttosto che ad un altro
è correlata alla specifica applicazione che si vuole realizzare: in
altre parole è necessario conoscere bene le caratteristiche dei protocolli
di comunicazione wireless per capire quali applicazioni è possibile
realizzare e quali no, oppure quali prestazioni ci possiamo aspettare
da un protocollo o da un altro una volta stabilita l'applicazione.
Nella presente tesi ci siamo concentrati sullo studio approfondito
degli standard IEEE 802.11 e Bluetooth, in particolare
riguardo il meccanismo di accesso al mezzo (MAC) trasmissivo
wireless, che, nel caso di entrambi gli standard, è la radiofrequenza
nella banda ISM 2.4 GHz. Nel Capitolo 1 e nel Capitolo
2 pertanto, ci siamo occupati di sintetizzare, per quanto possibile,
le caratteristiche dei due standard, che possono essere così riassunte:
- Bluetooth è uno standard per comunicazioni a corto raggio
(entro 10 m circa) e data rate non elevati (circa 700 kbps);
si avvale del supporto di costruttori quali Ericsson ed altri 2000
circa appartenenti al Bluetooth SIG (Special Interest Group) offrendo
un intero stack di protocollo, dal livello fisico (RF) ad applicazioni
di livello elevato quali trasferimento file, telefonia e supporto
audio, rimpiazzo dei cavi di collegamento tra periferiche; è stato
pensato per realizzare dispositivi a basso costo e a basso consumo
di potenza.
- IEEE 802.11 è uno standard per la realizzazione di LAN wireless,
sviluppato per estendere o addirittura sostituire LAN cablate poichè
i dispositivi conformi possono contare su un raggio d'azione di circa
150-300 m e su un data rate lordo di 11Mbps (protocollo IEEE
802.11b); lo standard fornisce solo le definizioni del livello fisico
e del metodo d'accesso al mezzo; è stato pensato per realizare dispositivi
con una batteria capace; attualmente sono attivi diversi gruppi all'interno
dell'istituto IEEE per lo sviluppo di alcune varianti
del protocollo, tra le quali segnaliamo IEEE 802.11a che opera
nella banda U-NII 5 GHz e che permette ai disposuitivi conformi di
realizzare un data rate lordo di 54Mbps.
In seguito, nel
Capitolo 3, ci siamo occupati di confrontare
i metodi d'accesso al mezzo (MAC) dei due standard ed in particolare
abbiamo affrontato le seguenti problematiche:
- Proprietà di creazione di reti efficienti, con particolare attenzione
al numero massimo di terminali gestibili in una singola ``cella
base'', alla capacità spaziale delle singole celle, alla velocità
di creazione delle reti e dei link tra i terminali ed infine alle
metodologie implementate da entrambi i protocolli per la creazione
ed il mantenimento delle reti.
- Proprietà delle topologie di rete realizzabili con i due protocolli,
con particolare attenzione alla capacità di estensione delle singole
celle base, alle capacità di connessione con altri tipi di rete, alle
problematiche di routing dei messaggi ed indirizzamento dei dispositivi
quando le topologie realizzate non consentano la connessione completa
della rete.
- Proprietà dei link realizzati tra i dispositivi di una singola cella
base, con particolare attenzione alle caratteristiche della sezione
radio dei dispositivi ed al throughput realizzabile con i singoli
link.
- Capacità di offrire un certo livello di Quality of Service (QoS).
Infine, nel
Capitolo 4, abbiamo portato il confronto tra
i due standard ad un livello più basso, contattando alcuni costruttori
di dispositivi compatibili con lo standard IEEE 802.11 e di dispositivi
compatibili con lo standard Bluetooth. Un problema sempre più sentito
dagli utenti, così come dai costruttori stessi, è il
consumo
di potenza dei dispositivi, proprio perchè, nella maggior parte dei
casi, la comunicazione wireless è implementata su dispositivi mobili
e quindi spesso alimentati a batteria. Ci siamo dunque occupati di
confrontare innanzitutto i metodi offerti dagli standard IEEEE802.11
e Bluetooth per ottimizzare il consumo di potenza dei terminali, e,
successivamente, abbiamo osservato le implementazioni di tali metodi
nei
chip di diversi costruttori, andando a confrontarne le
prestazioni in alcuni semplici scenari d'uso. Infine, abbiamo cercato
di dare un'idea del
prezzo dei singoli chipset, sia per Bluetooth
che per IEEE 802.11.
Bluetooth
- ACK Acknowledge.
- ACL Acronimo di Asynchronous Connection Less.
Una connessione asincrona a commutazione di pacchetto tra due dispositivi
Bluetooth. I link di tipo ACL sono tipicamente usati per la trasmissione
di dati. Bluetooth offre anche la possibilità di utilizzare dei link
di tipo SCO. Vedi SCO.
- Active Mode Lo stato operativo di un'unità Slave Bluetooth
all'interno della Piconet. In questo stato, l'unità Bluetooth partecipa
attivamente sul canale. Il Master programma le trasmissioni in base
alle richieste di traffico da e verso gli Slave attivi e, in più,
programma delle trasmissioni regolari per mantenere la sincronizzazione
degli stessi Slave. Gli Slave attivi ascoltano il canale durante gli
slot Master-to-Slave. Bluetooth supporta un massimo di 7 slave attivi
all'interno della Piconet.
- AM_ADDR Bluetooth Active Member Address. Un
indirizzo temporaneo assegnato ai membri attivi della stessa Piconet.
Può assumere i valori da 1 a 7. Vedere anche BD_ADDR, che
è l'indirizzo MAC fisso di un dispositivo Bluetooth.
- AR_ADDR Bluetooth Access Request Address. L'indirizzo
AR_ADDR viene assegnato dal Master ad uno Slave in modalità
PARK. Quest'indirizzo viene usato dagli Slave parcheggiati
durante la richiesta di uscita dalla modalità PARK.
- ARQ Automatic Repeat Request. Un meccanismo per
la gestione degli errori di trasmissione/ricezione secondo il quale
i pacchetti vengono confermati (ACKNOWLEDGE) oppure vengono
ritrasmessi. Il meccanismo ARQ fornisce un link affidabile ed è implementato
nel livello Baseband dello stack Bluetooth.
- BD_ADDR Bluetooth Device Address. Un indirizzo a 48
bit univoco, che individua i diversi
- Bluetooth device class E' un parametro che indica il
tipo di dispositivo e quindi quali servizi sono supportati dal dispositivo
stesso. La classe viene indicata durante la procedura di scoperta
dei dispositivi.
- Canale Fisico In pratica è rappresentato dalla sequenza
di hopping di una Piconet.
- CODEC Coder/Decoder. E' un dispositivo che converte
dall'analogico al digitale e viceversa per la trasmissione dei dati
attraverso un sistema di comunicazione digitale.
- CRC Cyclic Redundancy Check.
- DAC Device Access Code. E' un indirizzo usato
durante la fasi di PAGE, di PAGE SCAN e di PAGE
RESPONSE per identificare il dispositivo Slave oggetto delle suddette
fasi. E' derivato dal BD_ADDR del dispositivo Slave stesso.
- DH Data-High Rate. E' uno dei tipi di pacchetto
che possono essere trasmessi attraverso un link ACL. Vedi
anche DM.
- DM Data-Medium Rate. Un altro tipo di pacchetto
che può essere trasmesso attraverso un link ACL. Vedi anche
DH.
- DV Data Voice. Tipo di pacchetto utilizzato nei
link di tipo SCO per trasportare contemporaneamente delle
informazioni di tipo ``dati'' e delle informazioni di tipo ``voce''.
- FEC Forward Error Correction. Un metodo per il
controllo degli errori in un sistema di trasmissione dati, grazie
al quale il dispositivo ricevente può riconoscere e correggere un
carattere o un blocco di dati in cui sono presenti un certo numero
di errori. Questo metodo prevede l'aggiunta di un certo numero di
bit, usando un preciso algoritmo, ad ogni carattere o blocco dati
trasmesso.
- FH Frequency Hopping.
- GFSK Gaussian shaped Frequency Shift Keying.
E' la modulazione usata nel livello Radio del protocollo Bluetooth.
- HCI Host Controller Interface. Un livello dello
stack Bluetooth che fornisce un'interfaccia basata su comandi tra
il livello Link Manager ed il livello Baseband.
- Hold Mode I dispositivi appartenenti ad una Piconet
possono utilizzare delle modalità a basso consumo di potenza nei quali
la loro attività viene ridotta. Il Master può forzare gli Slave nelle
modalità HOLD, nella quale l'attività dello Slave si riduce
al solo mantenimento di un timer interno. Anche gli Slave possono
richiedere di entrare in questa modalità. Questa modalità offre una
riduzione del consumo di potenza di livello medio.
- HV High Quality Voice. Un tipo di pacchetto utilizzato
nei link di tipo SCO. I pacchetti HV non hanno CRC
e non vengono mai ritrasmessi.
- Inquiry La procedura di Inquiry permette ad un dispositivo
Bluetooth di scoprire quali altri dispositivi Bluetooth si trovano
nel proprio raggio d'azione, determinandone gli indirizzi BD_ADDR
e i clock. Successivamente, una volta terminata tale procedura, può
essere creata una connessione tra due dispositivi tramite la procedura
di page. NOTA: un dispositivo Bluetooth può essere scoperto
solo se si trova nella modalità INQUIRY SCAN.
- ISM Industrial Scientific Medical. La banda radio
che non necessita di licenze nella quale operano i dispositivi Bluetooth
(2.4 - 2.4835 GHz).
- L2CAP Logical Link Control and Adaptation Protocol.
In pratica è il livello Data Link dello stack Bluetooth. In questo
livello si realizza il multiplexing dei dati provenienti dai protocolli
d livello superiore, la frammentazione ed il riassemblaggio dei pacchetti
ed il trasporto delle informazioni QoS.
- LM Link Manager. E' un'entità software che gestisce
l'inizializzazione dei link, la configurazione ed altri aspetti della
gestione dei link stessi. Viene implementata nell'hardware Bluetooth.
- MAC Media Access Control. Insieme di regole che
stabiliscono le modalità di accesso al mezzo trasmissivo da parte
dei vari dispositivi.
- Master E' il dispositivo che controlla la Piconet da
esso stesso creata. Il clock del Master ed il suo BD_ADDR
vengono utilizzati per generare la sequenza di hopping che tutti i
dispositivi della Piconet devono seguire.
- Page Procedura tramite la quale viene stabilito un link
tra due dispositivi Bluetooth. Il dispositivo Master trasmette dei
messaggi di Page contenenti il DAC di uno specifico Slave.
Tale Slave si trova nella fase di page Scan e, una volta confermata
la ricezione del messaggio di Page, i due dispositivi iniziano la
fase di inizializzazione di un link ACL. Di solito, la procedura
di Page segue una procedura di Inquiry.
- Park Mode In questa modalità, un dispositivo Slave rimane
sincronizzato con la Piconet ma non partecipa attivamente al traffico.
I dispositivi ``parcheggiati'' rinunciano al proprio AM_ADDR
e ascoltano periodicamente il traffico, in attesa di messaggi broadcast
o di messaggi che il Master fornisce per mantenere sincronizzati tali
dispositivi. Questa modalità fornisce una riduzione elevata del consumo
di potenza.
- Piconet Un insieme di dispositivi Bluetooth sincronizzati
sulla medesima sequenza di hopping. Tutti i dispositivi sono dei nodi
della rete ed hanno la stessa implementazione. Tuttavia, nell'inizializzare
una Piconet, un'unità Bluetooth agirà da Master, determinando la sequenza
di hopping, e le altr unità agiranno da Slave. I ruoli delle unità
non sono fissi: in qualsiasi momento un dispositivo Slave può divenire
Master di una propria Piconet.
- RFCOMM Emulazione del protocollo di comunicazione seriale,
basato sullo standard ETSI TS 07.10.
- RSSI Receive Signal Strenght Indicator.
- Scatternet E' il termine che definisce la connessione
di più Piconet a formare una rete multi-hop. La connessione di due
Piconet viene realizzata tramite un dispositivo Bluetooth che si occupa
di inoltrare i pacchetti tra le due Piconet, dividendo il proprio
tempo di operatività tra le Piconet. Un dispositivo Bluetooth può
essere Slave in più di una Piconet ma Master in una sola Piconet.
- SCO Synchronous Connection Oriented. Una connessione
sincrona ``a commutazione di circuito'' per comunicazioni a banda
garantita. Viene crato riservando periodicamente degli slot sul canale
fisico.
- SDP Service Discovery Protocol. E' un protocollo
definito dallo standard Bluetooth che fornisce gli strumenti per la
scoperta dei servizi offerti da una particolare unità Bluetooth e
delle caratteristiche di tali servizi.
- SIG Special Interest Group. Il gruppo di esperti
che si occupa della definizione delle specifiche Bluetooth e della
certificazione dei dispositivi.
- Slave Un dispositivo Bluetooth non master. Una Piconet
può contenere un Master ed al massimo 7 Slave attivi contemporaneamente.
- Sniff Mode In quest'altra modalità Power Save, i dispositivi
Slave ascoltano il traffico della Piconet ad intervalli prefissati,
riducendo così il proprio duty cycle. Questa modalità fornisce una
bassa riduzione del consumo di potenza. La scala delle modalità power
save è dunque SNIFF, HOLD, PARK, dalla
meno efficiente fino alla più efficiente.
IEEE802.11
- ACK Acknowledgment.
- AID Association identifier. Identificativo dato
dall'Access Point alle stazioni autenticate ed associate.
- AP Access Point. Una stazione particolare che,
oltre ad essere un nodo della rete, si occupa di gestire il traffico
e, come opzione, anche l'accesso al mezzo, delle stazioni ad essa
associate.
- Associazione Servizio usato per effettuare una mappa
Access Point/Stazioni e permettere alle stazioni di usufruire dei
servizi del DS. Vedi anche DS.
- ATIM Ad-Hoc Traffic Indication Map. Mappa virtuale
del traffico bufferizzato in una certa stazione e destinato alle stazioni
in Power Save, utilizzato nelle configurazione topologica Ad-Hoc.
- Autenticazione Servizio usato per stabilire l'identità
di una stazione.
- Beacon Pacchetto speciale trasmesso periodicamente dall'
AP, oppure da una stazione scelta con un algoritmo distribuito se
la rete ha topologia ad-hoc, usato per la sincronizzazione e la trasmissione
di informazioni importanti.
- BSS Basic Service Set. Cella base dell'architettura
IEEE 802.11.
- BSSID BSS Identification.
- CCA Clear Channel Assessment.
- CF Contention Free. Modalità d'accesso al mezzo
controllata, ovvero le stazioni non devono contendere l'accesso al
mezzo trasmissivo.
- CFP Contention-free period. Intervallo di tempo
durante il quale l'accesso al mezzo delle stazioni che ne hanno fatto
espressamente richiesta è controllato dal PC. Vedi anche PC.
- CP Contention Period. Modalità d'accesso al mezzo distribuita,
ovvero le stazioni devono contendere l'accesso al mezzo trasmissivo.
- CRC Cyclic Redundancy Check. Metodo per il controllo
degli errori nei dati trasmessi attraverso un collegamento.
- CTS Clear To Send. Pacchetto speciale usato insieme
al pacchetto RTS, per ridurre la possibilità di collisioni dovute
a nodi nascosti. Vedi anche RTS.
- CW Contention Window. Parametro usato come unità
di misura temporale del Random Backoff.
- DA Destination Address.
- DBPSK Differential Binary Phase Shift Keying.
- DCF Distributed Coordination Function. Indica
il metodo d'accesso al mezzo applicato durante il CP.
- DIFS distributed (coordination function) interframe
space.
- DQPSK differential quadrature phase shift keying.
- DS distribution system. Entità, non specificata
dallo standard IEEE 802.11, che si occupa della connessione tra le
diverse BSS e consente la creazione di una ESS. Vedi anche ESS.
- DSM distribution system medium. Mezzo trasmissivo
con il quale opera il DS.
- DSS distribution system service. Servizio che
dev'essere fornito (implementato) nel DS. I servizi DS sono: Associazione,
Riassociazione, Disassociazione, Distribuzione, Integrazione.
- DSSS direct sequence spread spectrum.
- DTIM delivery traffic indication message. Indicazione
del traffico broadcast per le stazioni in Power Save.
- EIFS extended interframe space.
- EIRP equivalent isotropically radiated power.
- ESS extended service set. Elemento dell'architettura
IEEE 802.11 composto dal'interconnessione di diverse BSS attraverso
un DS.
- FCS frame check sequence. E' il campo che, all'interno
dei frame IEEE 802.11, contiene il codice CRC per il frame stesso.
- FHSS frequency-hopping spread spectrum.
- GFSK Gaussian frequency shift keying.
- IBSS independent basic service set. Indica una
BSS in cui non è presente un access point, ovvero una BSS con topologia
ad-hoc.
- IFS interframe space.
- IR infrared.
- ISM industrial, scientific, and medical.
- MAC medium access control.
- MMPDU MAC management protocol data unit.
- MPDU MAC protocol data unit.
- MSDU MAC service data unit.
- NAV network allocation vector. Contatore impementato
in ciascuna stazione che tiene traccia della durata di una eventuale
trasmissione in corso sul mezzo, usato dalla stazione stessa per ritardare
il tentativo di accesso al mezzo fino alla fine della trasmissione
in atto.
- PC point coordinator. Entità, di solito localizzata
nell'AP, che si occupa di gestire l'accesso al mezzo trasmissivo delle
stazioni associate durante il CFP.
- PCF oint coordination function. Indica il metodo
d'accesso al mezzo applicato durante il CFP.
- PDU protocol data unit.
- PHY physical (layer).
- PIFS point (coordination function) interframe
space.
- PLCP physical layer convergence protocol.
- PMD physical medium dependent.
- PN pseudo-noise (code sequence).
- PS power save (mode).
- RA receiver address.
- RF radio frequency.
- RSSI received signal strength indication.
- RTS request to send. Pacchetto speciale usato
insieme al pacchetto CTS, per ridurre la possibilità di collisioni
dovute a nodi nascosti. Vedi anche CTS.
- SA source address.
- SDU service data unit.
- SIFS short interframe space.
- SS station service. Servizio che dev'essere offerto
(implementato) all'interno di una stazione. I servizi SS sono: Autenticazione,
Deautenticazione, Privacy, Trasporto dei pacchetti.
- SSID service set identifier.
- STA station.
- TA transmitter address.
- TBTT target beacon transmission time. Intervallo
di tempo nominale tra la trasmissione di due Beacon.
- TIM traffic indication map. Mappa virtuale del
traffico bufferizzato dall'AP e destinato alle stazioni in Power Save.
- TSF timing synchronization function.
- TU time unit.
- WEP wired equivalent privacy. L'algoritmo crittografico
opzionale specificato dallo standard IEEE 802.11 per offrire un certo
livello di riservatezza dei dati trasmessi.
- WM wireless medium.
Sono tante le persone che devo ringraziare, alcune non le conosco
personalmente ma sono state con me quasi sempre in questi anni. Comincerò
dalle presenze ``reali''. Innanzitutto i miei familiari, soprattutto
mia sorella Simona che non ha bisogno di una laurea per essere la
migliore. Poi ringrazio mio fratello Paolo, che mi ha accompagnato
ogni giorno in questi anni, nella buona e nella cattiva sorte. Ringrazio
mia zia Sara, che continua a chiamarmi anche se io non lo faccio quasi
mai.
Grazie a Laura per il suo amore e la sua infinita comprensione:
senza di lei questa laurea sarebbe ancora uno dei miei più lontani
pensieri. Grazie a Giorgia: purchè non tocchi il VCR! Grazie a tutti
quelli che mi hanno distratto con il gioco della palla: è colpa
vostra se ho finito così tardi di studiare!(con qualcuno me la dovevo
pur prendere). Grazie a Massimo per tutti i dischi che ha rovesciato
sul mio tavolo in questi anni, vedi anche tu che sto cercando di recuperare
e poi, solo tu capisci la citazione nella dedica vero? Grazie ai miei
amici di Catanzaro, che mi hanno sempre sostenuto e hanno fatto delle
mie vacanze a casa sempre una cosa meravigliosa. Grazie alla Bri perchè
è a volte stata più vicina dei vicini.
Grazie a Nedo, Erina e Francesco per il supporto quotidiano e la pazienza
che hanno dimostrato nei miei confronti.
Grazie a tutti quelli che hanno suonato e cantato per me in tutti
questi anni: PJ, SG, N, AIC etc etc. : ci vediamo dove sapete!
Grazie a tutti quelli che non ho nominato ma che lo meritavano comunque.
Ed infine grazie a tutti quelli che ce l'hanno messa tutta per non
farmi arrivare fin qui, a tutti quelli che non ci credevano:
``Your weakness builds me, so some day you'll see!''
``I know i was born, and i know that i'll
die, the in-between is mine''
Bibliography
- [1]
-
International Standard ISO/IEC 8802-11: 1997(E) ANSI/IEEE Std 802.11, 1997
Edition, 1997.
- [2]
-
International Standard ISO/IEC 8802-11: 1999(E) ANSI/IEEE Std 802.11, 1999
Edition, 1999.
- [3]
-
R. S. Andren, Bozych.
Prism power management modes.
Technical report, Intersil Corp., 1997.
application note no. AN9665.
- [4]
-
J. Bray and C. Sturman.
Bluetooth:Connect without cables.
Prentice-Hall, London, UK, 2001.
- [5]
-
Buetooth SIG.
Specification of the Bluetooth System, v1.1 edition, 2001.
- [6]
-
E.Meihofer.
The performance of bluetooth in a highly densed packet environment.
Bluetooth Developer Conference, 2000.
Footnotes:
1Personal Digital Assistant, o computer palmare
2Con il termine `\"terminale `\" si indicherà da
qui in poi un qualsiasi dispositivo elettronico dotato di un'interfaccia
conforme ad uno standard per wireless LAN
3ISM : Industrial Scientific and Medical
4in generale si definisce throughput la quantità di lavoro per unità
di tempo
7di solito indicato col nome di Access Point
8si riferisce allo spettro visibile intorno a 850nm di lunghezza d'onda
11in seguito indicata come sequenza di hopping
12abbreviato per Frequency Hopping
13detto comunemente `\"slot `\"
14il nome Bluetooth deriva dal re vichingo `\"Harald Bluetooth `\"
che regnò sulla maggior parte della Danimarca e della Norvegia nel
tardo '900
16il pacchetto è l'unità informativa base,può avere dimensioni variabili
ma limitate da un massimo legato alla dimensione temporale dello slot
18assenza di cross-correlazione
19BER=bit error ratio ovvero la quantità di bit errati diviso per il
totale di bit trasmessi, ricevuti o processati nell'arco di un periodo
di tempo stabilito
21Bluetooth si riferisce ai servizi ACL e SCO col termine `\"link `\",
mentre abbiamo preferito chiamarli `\"servizi `\"
in quanto, ad esempio per il servizio ACL, c'è ambiguità tra il termine
`\"link `\" (connessione, collegamento) e la definizione
stessa di ACL, ovvero `\"connection-less `\" (privo
di connessione, collegamento). Comunque continuiamo da qui in poi
a usare la terminologia Bluetooth
22ovvero un master non può avere 2 link ACL con uno stesso slave
23con parametri temporali ristretti
24contenuto informativo vero e proprio
25elevata auto correlazione e bassa cross correlazione
26in questa fase uno slave ascolta le richieste di nuove connessioni
27in questa fase il master tenta di stabilire una connessione con uno
slave
28questa fase serve per scoprire nuovi dispositivi Bluetooth entro il
proprio raggio d'azione
30esiste un pacchetto chiamato FHS che contiene un AM_ADDR pari a `\"000 `\"
ma non è un pacchetto broadcast bensì un pacchetto dedicato alle
speciali procedure di inquiry e page
31un traffico dati con queste caratteristiche è detto
isocrono
32ovvero il pacchetto DV che è un pacchetto utilizzabile sia in un link
ACL che in un link SCO
35nello stato standby, nell'unità Bluetooth funziona solo il circuito
che realizza il clock nativo
38coerentemente con le specifiche che dedicano 32 frequenze ai processi
di page, page scan, inquiry, inquiry scan, slave response, master
response, inquiry response
39per comodità, da qui in poi faremo riferimento sempre a sistemi
che hanno a disposizione 79 canali di hopping
42termine usato per indicare un ritardo introdotto volutamente in un
processo per evitare collisione di eventi
43in termini di banda disponibile
4416 frequenze per treno, 2 frequenze per slot e considerando sia gli
slot TX che gli slot RX, abbiamo bisogno di 16 slot ovvero 16
x625μ
s=10
ms
45per il formato del pacchetto FHS vedere pagina
pageref
46pari a 128 slot ovvero 0.08
s
49Affinché uno slave rimanga sincronizzato al canale, basta solo il
CAC, quindi il master può inviare un pacchetto qualsiasi per
questo scopo
50la modalità hold è applicata ad un sigolo link ACL
51Il valore
Nsniff attempt dev'essere comunque > 0
52Nsniff attempt+
Nsniff timeout=
Tsniff
53ovvero in modalità park
54con il termine beacon di solito si indica un pacchetto di controllo
contenente informazioni importanti sullo stato di un collegamento
57questo è necessario perché il protocollo Baseband (MAC) non prevede
per i pacchetti un campo ``tipo'' che identifichi la provenienza
del pacchetto da protocolli di livello superiore quali TCS, RFCOMM
o SDP
58il GSM TS07.10 è un protocollo asimmetrico usato dai telefoni
cellulari GSM per raggruppare diversi flussi di dati in un unico cavo
seriale. RFCOMM è invece simmetrico e manda i frame TS07.10 al
livello L2CAP usando un sottoinsieme dei comandi TS07.10.
59nella terminologia IEEE 802.11 i pacchetti vengono detti
frame
60ovvero compatibile Ethernet
64il processo di trasmissione di frammenti multipli una volta avuto
accesso al mezzo è detto
fragment burst
65per overhead in questo caso, si intende l'aggiunta ad una trasmissione
di dati non strettamente informativi, ma comunque utili per altri
scopi
67Address 2 è uno dei 4 campi dedicati agli indirizzi contenuti in un
frame MAC. Per ulteriori dettagli si veda
4.8.2
69lo standard suggerisce uno
scheduler di tipo
Round Robin
(ad anello)
71ovvero ListenInterval specifica quanti beacon la STA lascia passare
senza considerarne il contenuto dopo averne ricevuto uno ed interpretato
il contenuto.
72dunque nelle IBSS non si usa un elemento TIM incluso in un frame di
tipo beacon, bensì un frame dedicato, l'ATIM appunto
73la durata della finestra ATIM Window rimane invariata per tutto il
tempo che esiste la IBSS; inoltre, se il valore ATIM Window è 0 vuol
dire che il power management non è previsto per quella IBSS
75MLME=MAC Layer Management Entity
76SSID è l'identificativo di un ESS (extended service set) oppure di
una IBSS (WLAN ad hoc). Vedi tabella
4.7.
77come si vede dalla tabella l'indirizzo MAC BSSID viene sempre trasportato
dai frame, eccetto quando questi transitano solo tra AP, ovvero ToDS=1
e FromDS=1
78la durata per trasmettere un determinato frame dipende chiaramente
dal PHY scelto e dalla velocità di trasferimento scelta
79Equivalent Isotropically Radiated Power
80ricordiamo che nella maggior parte dei paesi, tale banda si estende
dai 2.4 GHz a 2.4835 GHz
82vi sono diverse sequenze di Barker di lunghezza differente, da 1 a
13 chip
83ovvero la banda compresa tra i due punti estremi dello spettro, quando
la potenza del segnale è praticamente nulla
84il data rate 5.5Mbps viene ottenuto usando un sottoinsieme dei codici
generati per il data rate 11Mbps
85per il numero del canale si veda la figura
4.32
86considerando link ACL, vedi tabella
3.6
87considerando dispositivi IEEE 802.11b,. vedi
4.37
88un esempio tipico è l'
head-set cuffia+microfono realizzato
con tecnologia Bluetooth da Ericsson come accessorio per telefoni
cellulari
89il canale trasmissivo in Bluetooth è definito dalla sequenza di hop
(vedi
5.3.2)
90si tratta di un'autenticazione a livello di collegamento (
link
layer)
91Point Coordination Function (PCF)
92in alcuni paesi come Francia, Spagna o Giappone, a causa di regolamentazioni
locali, sono disponibili solo 23 canali. Vedi tabella
3.1
93lo standard prevede anche la possibilità di utilizzare la tecnica
Frequency Hopping Spread Spectrum (FHSS) come abbiamo visto nel capitolo
2. In questa sezione non ci occuperemo di questa implementazione perchè
ormai non è più utilizzata nei dispositivi commerciali.
94non tutti utilizzabili in tutte le parti del mondo. Vedi tabella in
figura
4.32
95Asynchronous Connection Less
96Synchronous Connection Oriented
97viene usato un CRC a 16 bit per il payload dei pacchetti ACL. Un altro
CRC a 8 bit protegge l'header dei pacchetti sia SCO che ACL.
98all'interno di un superframe infatti, come specificato dallo standard,
dev'essere sempre presente un periodo con accesso al mezzo di tipo
DCF, per la trasmissione di frame di tipo
management. Può capitare
che il PC trovi il mezzo occupato da una trasmissione ancora in corso
quando esso deve invece iniziare un periodo CFP. Il PC deve allora
ritardare tale inizio, non potendo tuttavia recuperare il tempo perso
aumentando la durata del CFP successivo, che deve terminare sempre
in un istante tale da garantire un minimo periodo CP all'interno del
superframe.
99nel 2001 la Intersil deteneva almeno il 66% del mercato mondiale
della produzione di chipset IEEE 802.11b
File translated from
TEX
by
TTH,
version 3.13.
On 11 Apr 2003, 17:27.